Overview of FHA-E Series Robot Reduceer
Overview of FHA-E Series Robot Reduceer
 Overview of FHA-E Series Robot Reduceer
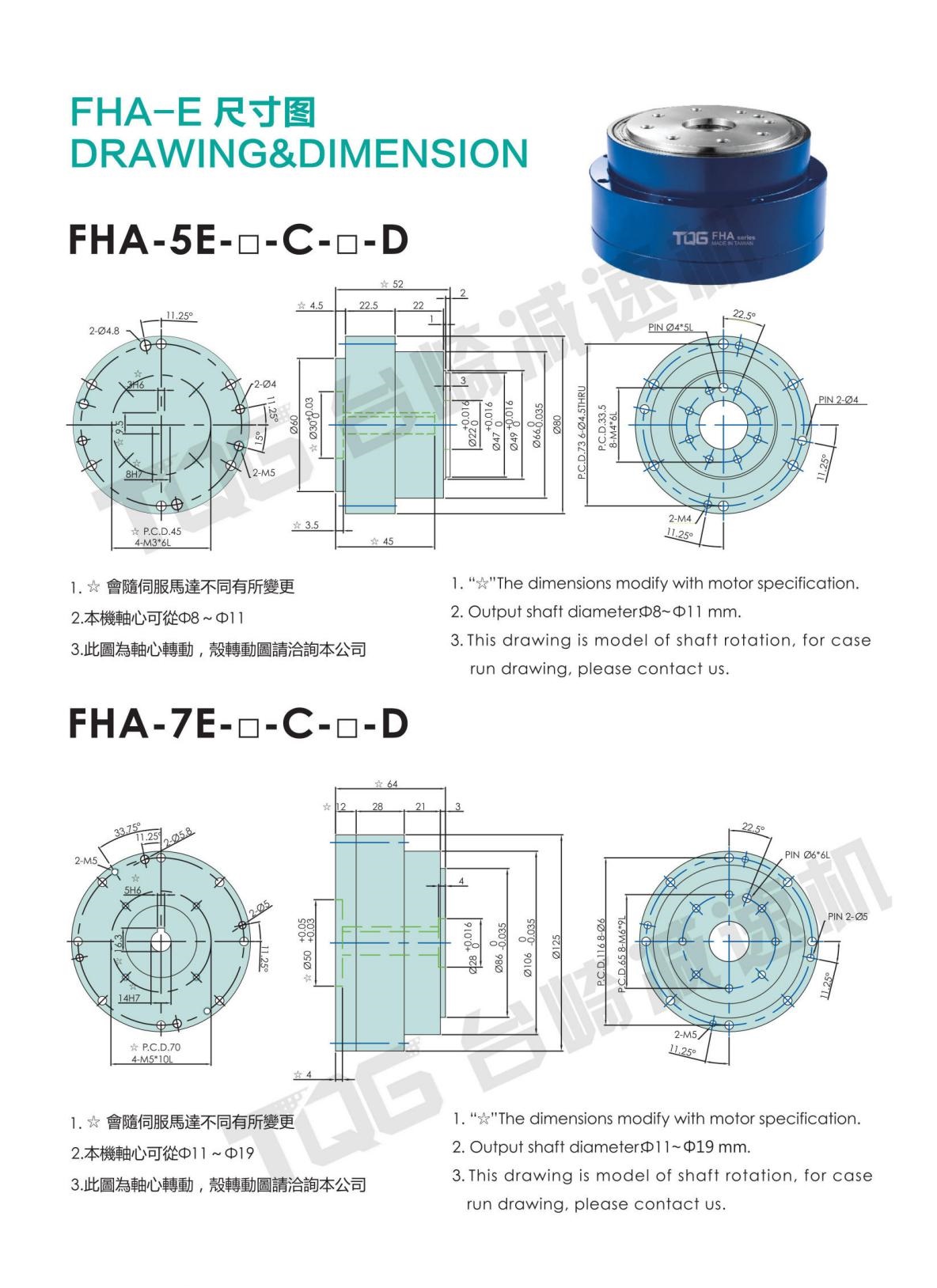
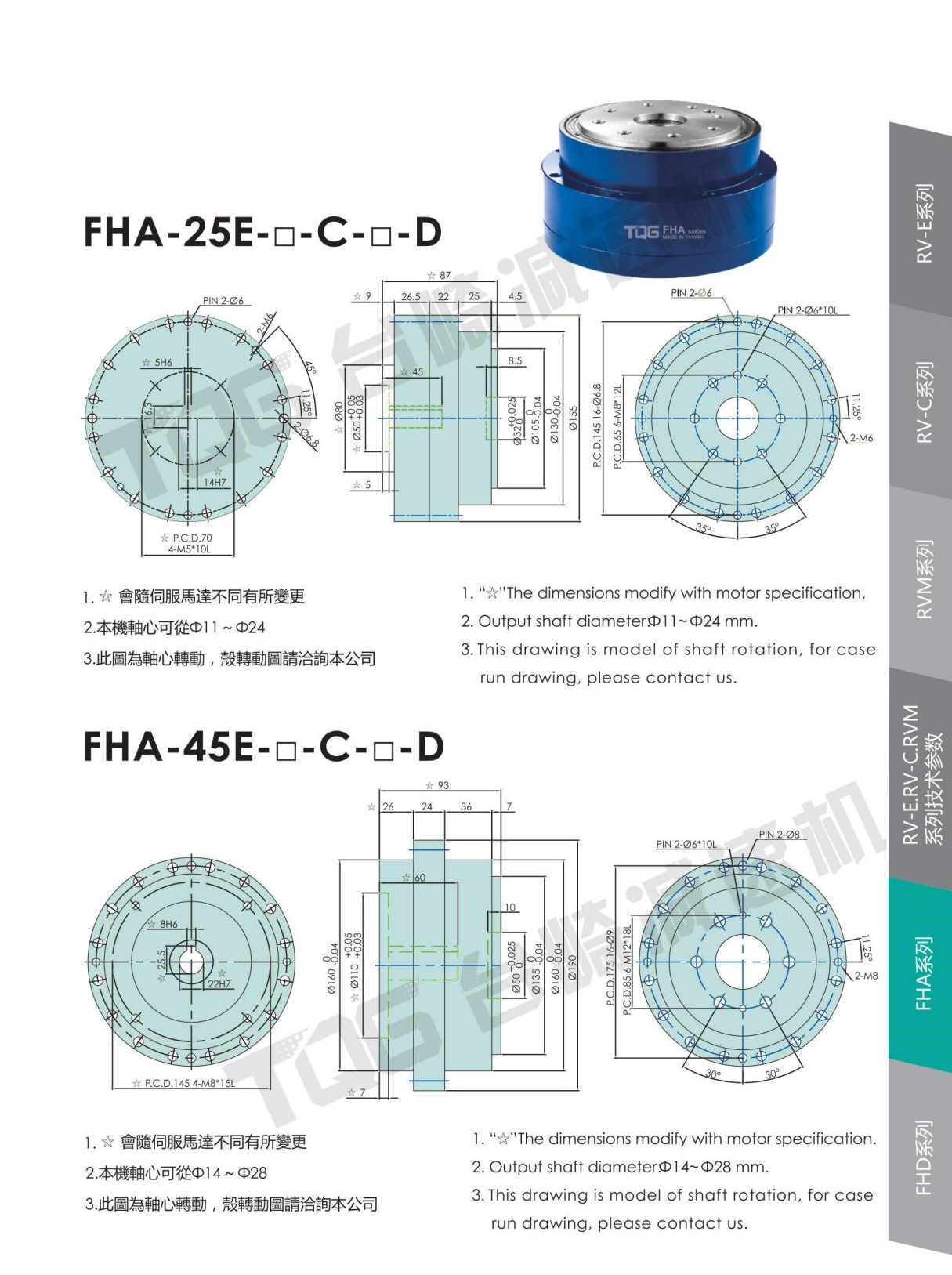
Overview of FHA-E Series Robot Reduceer- Type: FHA-5E ~ FHA-450E
- Backlash: ≤1-5 Arc.min
- Forhold: 1/35 ~ 1/140
- Kapacitet: 0.1kw ~ 15kw
- Rotation: Shaft løbe eller tilfælde sol
- Nominelt udgangsmoment: 60Nm ~ 5100Nm
- Direkte udgang, tæt indgreb og høj præcision
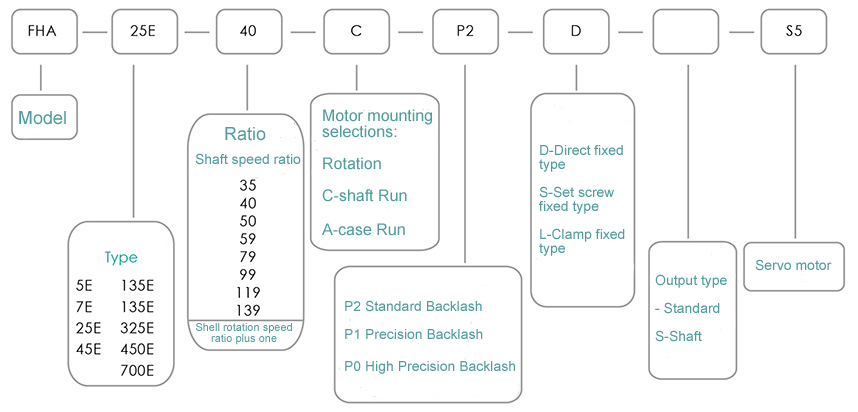
Indikation af FHA-E Series Robot Reduceer
Beskrivelse af FHA-E Series Robot Reduceer
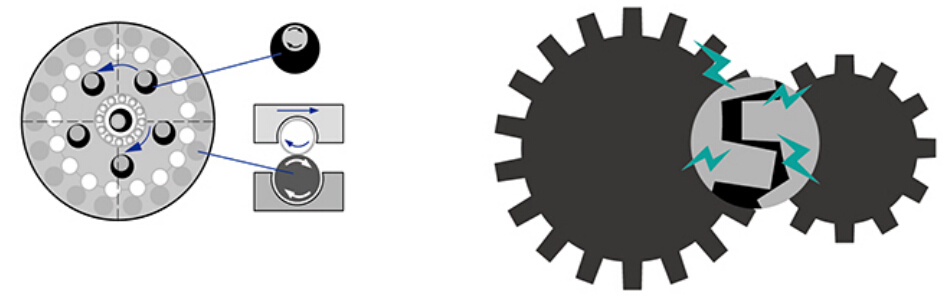
■ FHA-E-gearkasseens belastningskapacitet forbedres kraftigt ved at anvende load-decentraliseret teknologi til multifunktionsindgreb. Mens traditionelle spindelhjul eller spiralhjul må tåle overbelastningsbelastning på grund af indgreb med kun en tand.

■ Ekstremt høj effektivitet opnås takket være kørslen af eksterne og interne ruller involveret glidning og selvrotation. Mens der i de traditionelle mekanismer er transmissionen af ujævnt drejningsmoment forårsaget af gearets slid eller interferens.
■ Kreativ transmission, fremragende fordele
FHA-E Series Robot Reducer giver alle fordele ved harmonisk gearkasse negativ mangel på flexplint.
Uden at øge stadierne af reduceren kan FHA-E robot gearkasse give høje forhold på grund af planetgeardrevet. Og cycloid-drev giver høj belastningskapacitet uden indlysende vibrationer.
■ Høj effektivitet med lavt glidende tab
Alle glideelementer består af rulle. Når rullen ruller, er glidning også involveret, og derfor er mekanisk tab næsten ignoreret og opnået overlegen høj effektivitet op til 95% under kun et trin reduktion.
■ Glat betjening med lav støj
FHA-E Series Robot Reducer giver multi-tænder indgribende indgreb, samtidig med at der opstår modvægt mellem twin-disc konstruktion af forskydningsvibrationer, høj overlapningskoefficient og rullekontakt med passende mellemrum for at undgå interferenslignende gear, hvilket kunne reducere støjen og vibrationer effektivt.
■ Høj præcision med lav tilbageslag
Næsten nul backlash af FHA-E robot reducer takket være multi-tænder meshing engagement, og derfor er transmissionsafvigelsen kun 25% af den traditionelle gear reducer.
■ Højt drejningsmomentudbytte på grund af lang diameter af bølgeoptager
Det højere drejningsmoment af FHA-E robot reducer på grund af den større diameter af rullende bølge af rulletransmission end traditionelle skiver på grund af den almindelige funktion af den rullende bølge.
■ Kompakt struktur med højt forhold
Enfaset FHA-E robot gear kan opnå et højt forhold, fordi mængden af ruller på rulleskiven er lig med forholdet. Udgangsaksel og indgangsaksel på FHA-E robotreduktionsmekanisme er på linie, hvis konstruktion er forstærket og pladsbesparende, og dermed er dimensionen mere kompakt under det samme reduktionsforhold for gearreducer og ormreducer.
■ Multi-tænder engagement bidrager til høj belastning kapacitet
Sammenlignet med en tandmaskning af snekkredskabet eller gearreduceringen, er FHT-A robot gearkasse udstyret med 50% ruller indgribende indgreb samtidig med dobbeltskive rullemekanisme. Derfor er belastningskapaciteten højere end den traditionelle gearreduktion.
■ Rollertand bidrager til lang levetid
Overordnet robust mekanisme, fri for vedligeholdelse og lang levetid på grund af det kreative rullehjul, fremragende teknologi og proces, speciel rulleoversigt uden brudte tænder.
■ Bedre økonomisk fordel som følge af lavt energiforbrug
FHA-E robot reducer funktioner med højt moment output, høj effektivitet, lav drift belastning, lavt energiforbrug og højere økonomisk fordel.
■ Huldesign for direkte udgang
FHA-E RV reducer er designet venlig med hul aksel og giver mulighed for at matche routing hydrauliske rør og elektrisk kabel gennem FHA-E reducer. Og det er nemt at montere motoren gennem kobling og motorflange.
| Model | FHA-5E | FHE-7E | FHA-25E | FHA-45E | ||||||
| Rotation | Aksel Løb | Sag Løb | Aksel Løb | Sag Løb | Aksel Løb | Sag Løb | Aksel Løb | Sag Løb | ||
| Forhold | 40 | 41 | 40 | 41 | 40 | 41 | 35 | 36 | ||
| 50 | 51 | 50 | 51 | 50 | 51 | 40 | 41 | |||
| * | * | 59 | 60 | 60 | 61 | 50 | 51 | |||
| * | * | * | * | * | * | 59 | 60 | |||
| * | * | * | * | * | * | 79 | 80 | |||
| Nominelt ouput moment | nm kgf-m | 60 (6.1) | 83 (8.46) | 245 (25) | 460 (46.8) | |||||
| Acceleration og bremsemoment | nm kgf-m | 97.5 (9.9) | 136 (14) | 515 (52) | 1158 (118) | |||||
| Øjeblikkeligt Maks.allow-drejningsmoment | nm kgf-m | 245 (25) | 415 (42) | 1000 (102) | 2300 (234.4) | |||||
| Nominel indgangshastighed | Nr (Rpm) | 2000 | 2000 | 2000 | 2000 | |||||
| Nominel levetid | hr | 6000 | 6000 | 6000 | 6000 | |||||
| Tilladt Maks.indgangshastighed | nmaks (Rpm) | 3000 | 3000 | 3000 | 2500 | |||||
| Tiltende stivhed | Nm / buemin kgf-m / buemin | 82 (8.3) | 117 (12) | 372 (38) | 931 (95) | |||||
| Torsionsstivhed | Nm / buemin kgf-m / buemin | 18 (1.83) | 20 (2) | 49 (5) | 108 (11) | |||||
| Maksimal bevægelse | (Buemin) | <3,0 | <3,0 | <3,0 | <3,0 | |||||
| Angle transmission fejl | ATE (Arcsec) | 40 | 80 | 40 | 40 | |||||
| Backlash | Standard backlash | (Buemin) | <5,0 | <5,0 | <5,0 | <5,0 | ||||
| Precision backlash | <3,0 | <3,0 | <3,0 | <3,0 | ||||||
| Høj præcision backlash | * | * | * | <1,0 | ||||||
| Max.tilting drejningsmoment | nm kgf-m | 282 (28,8) | 392 (40) | 1764 (180) | 3332 (340) | |||||
| Nominel radial kraft | nm | 118 | 196 | 882 | 1666 | |||||
| Max.axial kraft | N | 885 | 1470 | 3920 | 5194 | |||||
| (I = GD2/ 4) Input inerti Kg-m2 | 1.65x10-6 | 2.60x10-6 | 1.08x10-6 | 4.50x10-6 | ||||||
| 1.46x10-6 | 1.85x10-6 | 0.65x10-6 | 3.75x10-6 | |||||||
| * | 1.66x10-6 | 0.45x10-6 | 2.4x10-6 | |||||||
| * | * | * | 1.75x10-6 | |||||||
| * | * | * | 2.4x10-6 | |||||||
| Vægt | KG | 4.5 | 8.5 | 12 | 32.5 | |||||
| Rotation | Aksel Løb | Sag Løb | Aksel Løb | Sag Løb | Aksel Løb | Sag Løb | Aksel Løb | Sag Løb | ||
| Forhold | 50 | 51 | 50 | 51 | 59 | 60 | 59 | 60 | ||
| 60 | 61 | 60 | 61 | 79 | 80 | 79 | 80 | |||
| 79 | 80 | 79 | 80 | 99 | 100 | 99 | 100 | |||
| 99 | 100 | 99 | 100 | 119 | 120 | 119 | 120 | |||
| * | * | * | * | * | * | 139 | 140 | |||
| Nominelt ouput moment | nm kgf-m | 1400 (136) | 1615 (165) | 3595 (366) | 5100 (520) | |||||
| Acceleration og bremsemoment | nm kgf-m | 2083 (212) | 4043 (412) | 7963 (812) | 11025 (1125) | |||||
| Øjeblikkeligt Maks.allow-drejningsmoment | nm kgf-m | 4155 (423.5) | 8075 (823) | 17975 (1830) | 25500 (2600) | |||||
| Nominel indgangshastighed | Nr (Rpm) | 2000 | 1500 | 1500 | 1500 | |||||
| Nominel levetid | hr | 6000 | 6000 | 6000 | 6000 | |||||
| Tilladt Maks.indgangshastighed | nmaks (Rpm) | 2500 | 2500 | 2000 | 2000 | |||||
| Tiltende stivhed | Nm / buemin kgf-m / buemin | 1176 (120) | 2940 (300) | 4900 (500) | 7448 (760) | |||||
| Torsionsstivhed | Nm / buemin kgf-m / buemin | 196 (20) | 392 (40) | 980 (100) | 1176 (120) | |||||
| Maksimal bevægelse | (Buemin) | <1,5 | <1,5 | <1,5 | <1,5 | |||||
| Angle transmission fejl | ATE (Arcsec) | 40 | 40 | 40 | 40 | |||||
| Backlash | Standard backlash | (Buemin) | <4,0 | <4,0 | <4,0 | <4,0 | ||||
| Precision backlash | <2,0 | <2,0 | <2,0 | <2,0 | ||||||
| Høj præcision backlash | <1,0 | <1,0 | <1,0 | <1,0 | ||||||
| Max.tilting drejningsmoment | nm kgf-m | 4312 (440) | 7840 (800) | 14112 (1440) | 17640 (1800) | |||||
| Nominel radial kraft | nm | 2156 | 3920 | 7056 | 8820 | |||||
| Max.axial kraft | N | 7840 | 14700 | 19600 | 24500 | |||||
| (I = GD2/ 4) Input inerti Kg-m2 | 5.65x10-5 | 1.9x10-4 | 6x10-4 | 9x10-4 | ||||||
| 4.40x10-5 | 1.8x10-4 | 5.4x10-4 | 7.3x10-4 | |||||||
| 3.53x10-5 | 1.78x10-4 | 4x10-4 | 6x10-4 | |||||||
| 2.63x10-5 | 1.51x10-4 | 2.8x10-4 | 4.8x10-4 | |||||||
| * | * | * | 4.2x10-4 | |||||||
| Vægt | KG | 32.5 | 37 | 65 | 81 | |||||


Relaterede produkter
 RV-E serie robotgearkasse
RV-E serie robotgearkasse- FHD-C serie robotgearkasse
- RV-M serie robotgearkasse
- RV-C serie robotgearkasse
- SHD-serie harmoniske gearkasse
- PC-NMRV Gear Motor
- CSG / CSF komponent sæt af harmonisk gearkasse
- PAR Precision højre vinkel planetarisk gearkasse
- Hovedprocesstruktur og patenteret teknologi af TQG planetgearkasse
- PAD High Precision Flange Output Planetary Gearbox