Overview of FHD-C serie robotgearkasse
Overview of FHD-C serie robotgearkasse
 Overview of FHD-C serie robotgearkasse
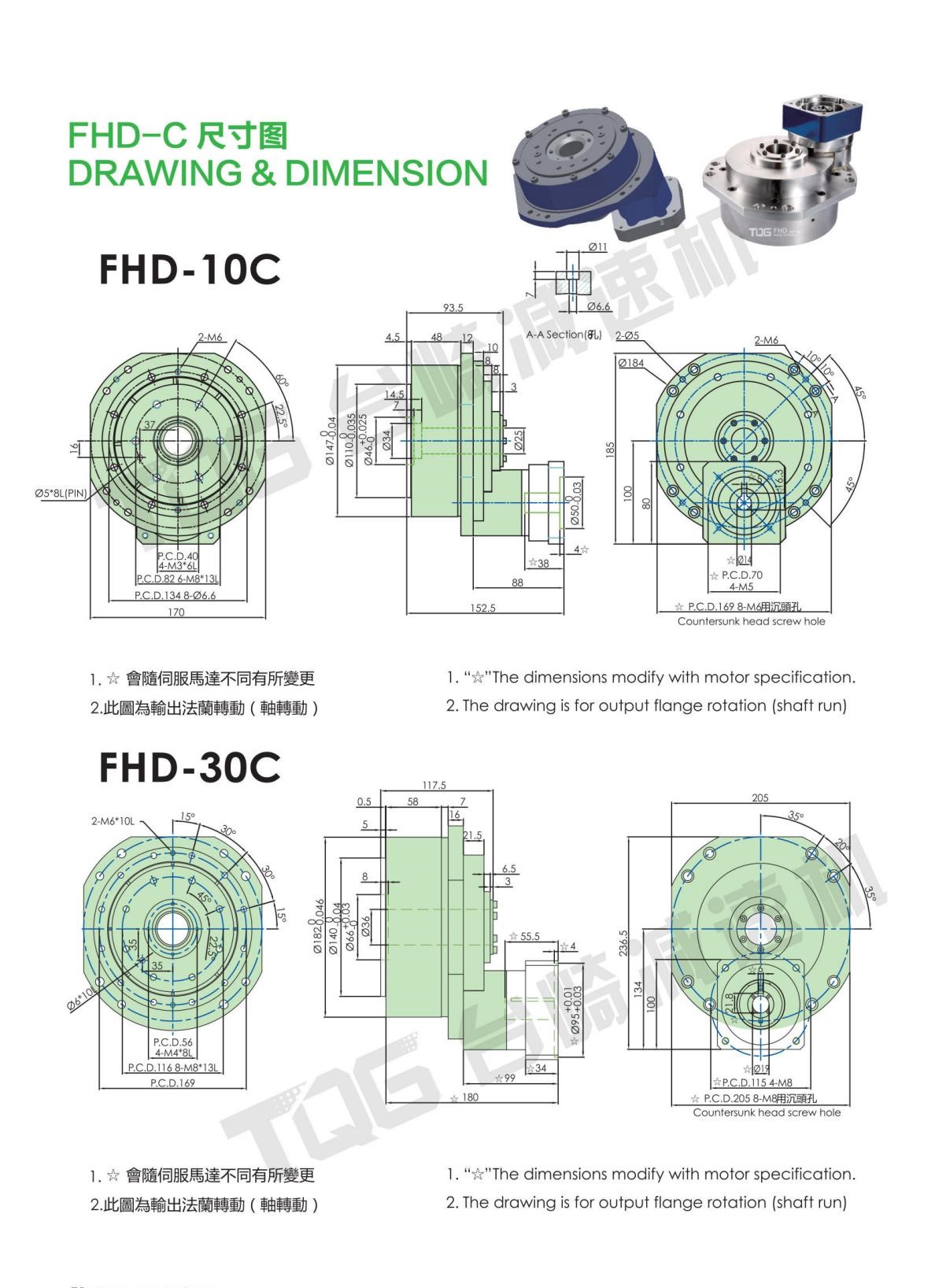
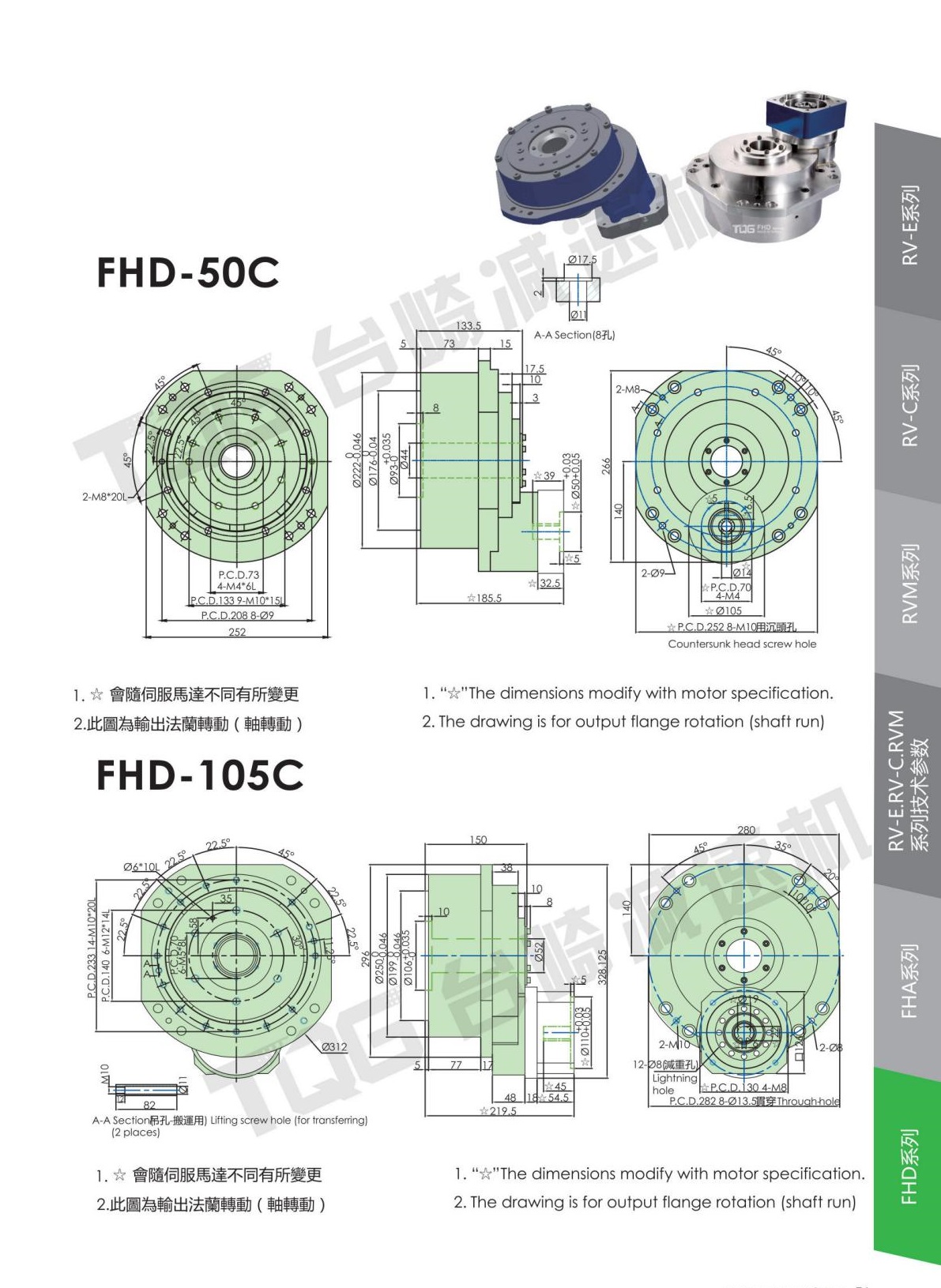
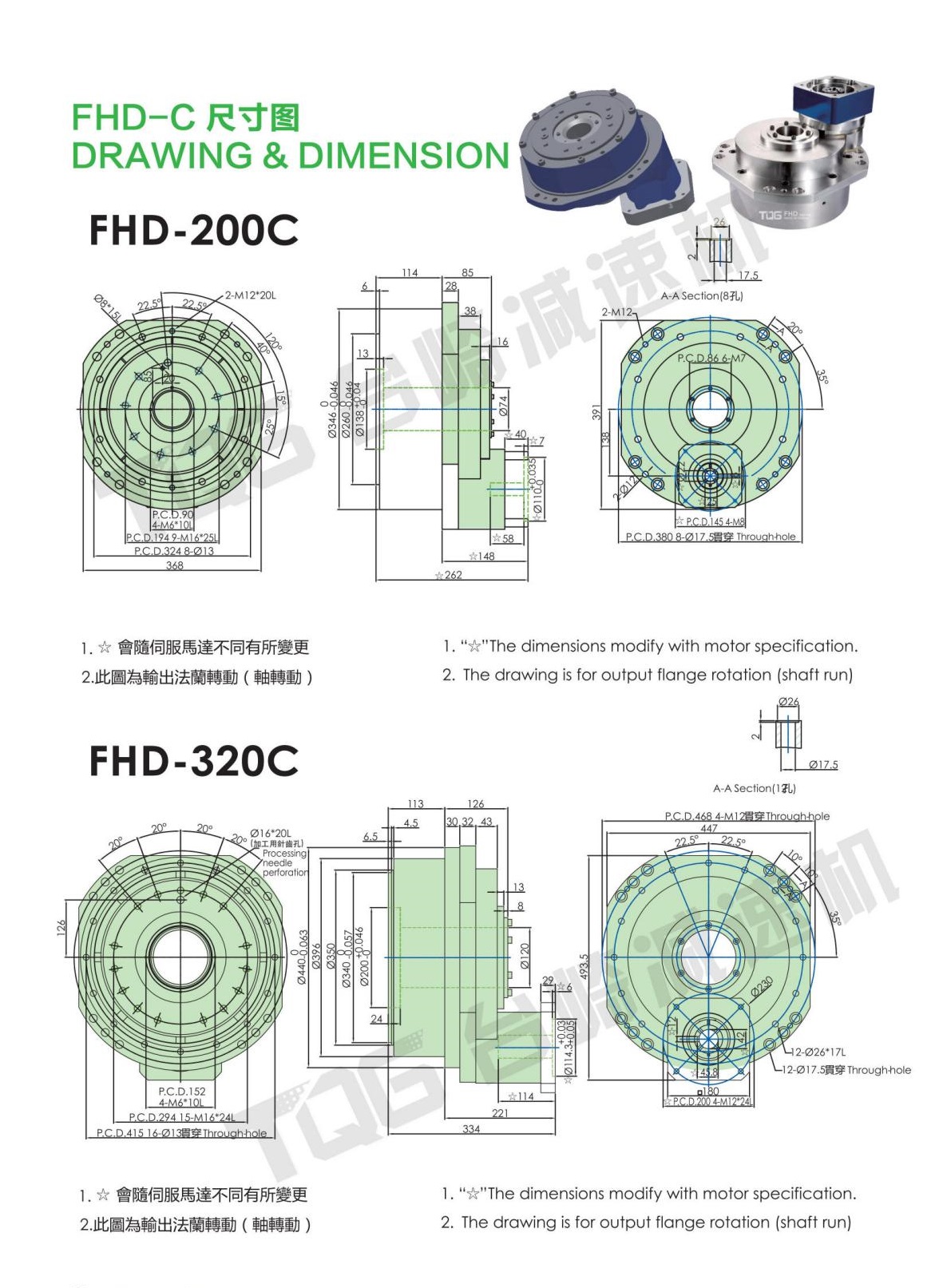
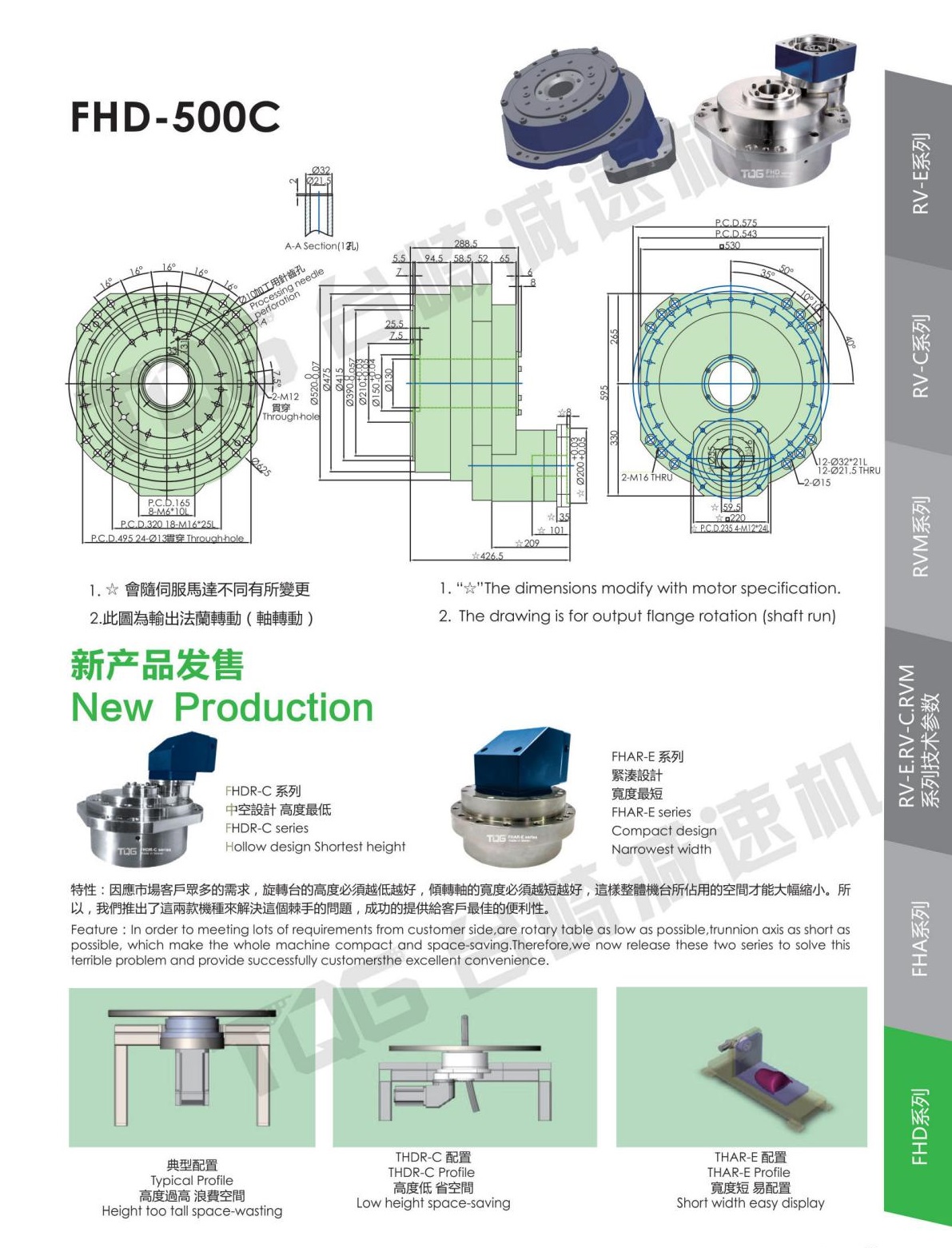
Overview of FHD-C serie robotgearkasse- Type: FHD-10C ~ FHD-500C
- Backlash: ≤1-5 Arc.min
- Forhold: 1 / 64,38 ~ 1/219
- Kapacitet: 0.2kw ~ 15kw
- Rotationsmetode: akselkørsel
- Nominelt udgangsmoment: 98Nm ~ 4900Nm
- Holde kropsdesign og direkte udgang. Designet specielt til robotbasen.
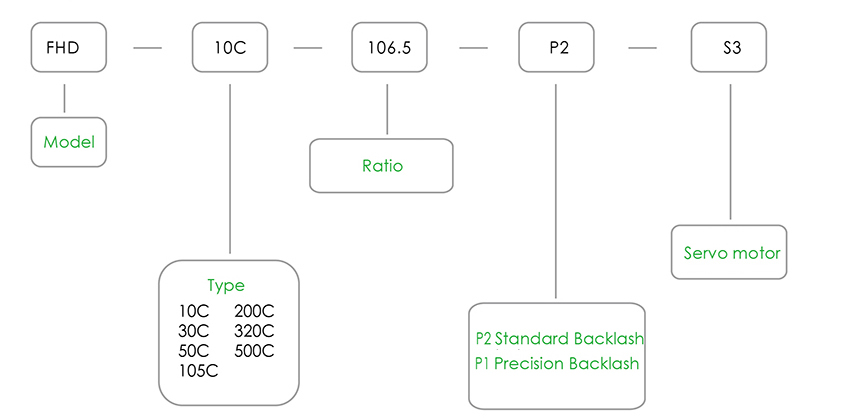
Indikation af modelnumre i FHD-C serie robotgearkasse

Beskrivelse af FHD-C Serie Robot Gearbox Reduktion
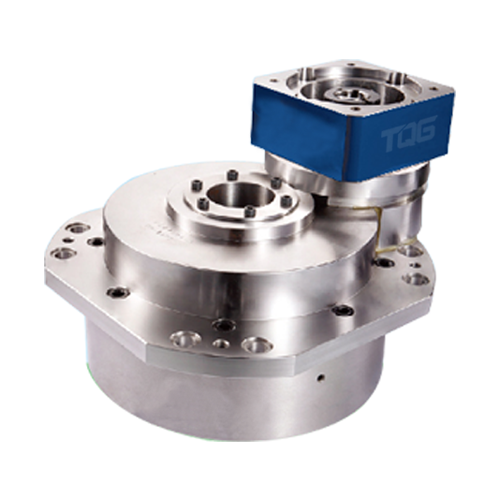
TQG FHD-C serie robot gearkasse er designet af en hul aksel og kan monteres på servomotor direkte for at imødekomme de forskellige industial markedskrav. Den første akse i de fleste maskiner og robotarmene beder om hul design, mens FHD-C hastighedsreduktionsapparatet udviklet af TQG er de perfekte løsninger til ovenstående. Funktionerne i TQG FHD-C servo gearkasse er mere bekvemme og anvendelsesvenlige.
TQG FHD-C RV reducer har introduceret bremsemaskine, positioner, værktøjsmagasin, fødevaremaskiner, kemisk industri, rørbøjningsmaskine, forår / skrue / møtrik industri, elektronikindustri, automatiseringsudstyr, stempling robot, høj præcision 4-akse og 6-akse maskiner arm og dets tilhørende 7 og 8 akse applikationer, spildevandsbehandling udstyr, som er alternativet til HD hastighed reducere (harmonis reducere) og HD gearkasser (harmoniske gearkasser). Og det laveste forhold er 64: 1, det højeste forhold kan være op til 219: 1.
TQG FHD-C RV reduceringsmaskiner anvendes i vid udstrækning i positioner, værktøjsmagasin, robotarm, maskinværktøj, femaksehoved, svinghoved osv. (Kun til reference)
| Model | FHD-10C | FHD-30C | FHD-50C | FHD-105C | FHD-200C | FHD-320C | FHD-500C | ||
| Rotation | Aksel Løb | Aksel Løb | Aksel Løb | Aksel Løb | Aksel Løb | Aksel Løb | Aksel Løb | ||
| Forhold | 106.5 | 64.38 | 78.4 | 97.6777 | 71.9924 | 94.5 | 111 | ||
| 154 | 84.18 | 102.4 | 110.5677 | 92.2932 | 109.5 | 147 | |||
| * | 103.98 | 126.4 | 136.3478 | 105.827 | 123 | 183 | |||
| * | * | * | 187.9079 | 138 | 153 | 219 | |||
| * | * | * | * | * | * | * | |||
| Nominelt udgangsmoment | nm kgf-m | 98 (10) | 295 (30) | 490 (50) | 1030 (105) | 1960 (200) | 3136 (325) | 4900 (500) | |
| Acceleration og bremsemoment | nm kgf-m | 245 (25) | 737 (75) | 1225 (125) | 2575 (262) | 4900 (500) | 7840 (800) | 12250 (1250) | |
| Øjeblikkeligt Maks.allow-drejningsmoment | nm kgf-m | 490 (50) | 1475 (150) | 2450 (250) | 5150 (525) | 9800 (1000) | 15680 (1600) | 24500 (2500) | |
| Nominel indgangshastighed | Nr (Rpm) | 2000 | 2000 | 1500 | 1500 | 1500 | 1500 | 1500 | |
| Nominel udgangshastighed | Nr (Rpm) | 15 | 15 | 15 | 15 | 15 | 15 | 15 | |
| Nominel levetid | hr | 6000 | 6000 | 6000 | 6000 | 6000 | 6000 | 6000 | |
| Tilladt Maks.indgangshastighed (sporadisk) | nmaks (Rpm) | 28 | 47 | 38 | 26 | 28 | 21 | 18 | |
| 19 | 36 | 29 | 23 | 22 | 18 | 14 | |||
| * | 29 | 24 | 18 | 19 | 16 | 11 | |||
| * | * | * | 13 | 14 | 13 | 9 | |||
| Tilladelig maks. Udgangshastighed (sammenhængende) | Min (Rpm) | 19 | 31 | 26 | 15 | 21 | 16 | 14 | |
| 13 | 24 | 20 | 14 | 16 | 14 | 10 | |||
| * | 19 | 16 | 11 | 14 | 12 | 8 | |||
| * | * | * | 8 | 11 | 10 | 7 | |||
| Tiltende stivhed | Nm / buemin kgf-m / buemin | 421 (43) | 1068 (109) | 1960 (200) | 2813 (287) | 9800 (1000) | 12740 (1300) | 24500 (2500) | |
| Torsionsstivhed | Nm / buemin kgf-m / buemin | 47 (4.8) | 147 (15) | 255 (26) | 510 (52) | 980 (100) | 1960 (200) | 3430 (350) | |
| Maksimal bevægelse | (Buemin) | <2,0 | <2,0 | <1,0 | <1,0 | <1,0 | <1,0 | <1,0 | |
| Angle transmission fejl | ATE (Arcsec) | 50 | 50 | 50 | 50 | 50 | 50 | 50 | |
| Backlash | Standard backlash | (Buemin) | <5,0 | <4,0 | <3,0 | <3,0 | <3,0 | <3,0 | <3,0 |
| Precision backlash | <3,0 | <2,0 | <1,0 | <1,0 | <1,0 | <1,0 | <1,0 | ||
| Max.tilting drejningsmoment | nm kgf-m | 1372 (140) | 1960 (200) | 3528 (360) | 4900 (500) | 17640 (1800) | 39200 (4000) | 78400 (8000) | |
| Nominel radial kraft | nm | 686 | 980 | 1764 | 2450 | 8820 | 20580 | 34300 | |
| Max.axial kraft | N | 5880 | 8820 | 11760 | 13720 | 19600 | 29400 | 39200 | |
| Start effektivitet | % | 65 | 70 | 70 | 80 | 80 | 80 | 80 | |
| Vægt | KG | 10.7 | 20 | 34 | 46 | 100 | 176 | * | |
Relaterede produkter
 RV-C serie robotgearkasse
RV-C serie robotgearkasse- RV-E serie robotgearkasse
- RV-M serie robotgearkasse
- FHA-E serie robotgearkasse
- AF-FH Hole Output Flange Input Speed Reduceer
- VRSF Precision Planetary Gearbox
- CSG / CSF komponent sæt af harmonisk gearkasse
- CNC værktøjsmaskiner udstyr
- TQG Precision Planetary Gearboxes anvendes i Industrial Robotic Automation
- AAW-A (B) S-RF Big Hollow Rotary Flange Type Precision 90 Graders Gearkasse