Überblick DG Rotierender Hohlreduzierer
Überblick DG Rotierender Hohlreduzierer
 Überblick DG Rotierender Hohlreduzierer
Überblick DG Rotierender Hohlreduzierer- Die direkte Verbindung vereinfacht die Konstruktion des hohlen Drehantriebs und kann die Zuverlässigkeit verbessern.
- Der hohle Drehantrieb mit großem Durchmesser vereinfacht die Verkabelung und Verrohrung.
- Hochpräzise Positionierung. Die Abweichung der Winkelübertragung beträgt 4 min.
- Einfache Herkunftsregression dank der Verwendung des Herkunftssensor-Kits.
- Die Trägheitslastpositionierung kann durch den hohlen Drehtisch DG in kurzer Zeit erreicht werden.
- Kommunikationsimpulseingang und integrierter Controller-Treiber.
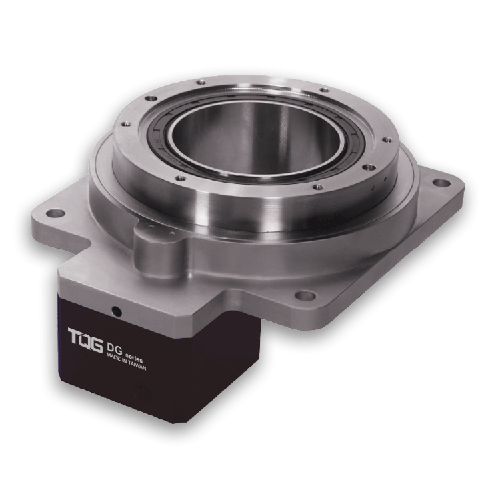
Beschreibung des hohlen Drehantriebs DG
DG ist eine Art Serienprodukt, das einen hohlen Drehantrieb mit hoher Steifigkeit und einen Schrittmotor mit geschlossenem Regelkreis integriert. Es zeichnet sich durch eine einfache Bedienung des Schrittmotors aus und inzwischen können große Trägheitslasten mit einem hohen Maß an Genauigkeit positioniert werden.
Der hohle Drehantrieb der Serie DG verwendet eine hochpräzise Getriebestruktur und Radiallager, um das Drehmoment und die Steifigkeit zu verbessern, wodurch die Last stabiler wird. Außerdem kann der Servomotor oder der Schrittmotor beliebig geschnitten werden, um die Anzahl von Bits zu erfüllen, die der Nockenindexierer nicht steuern kann, und die Positionierungsgenauigkeit kann mit dem Direktantrieb vergleichbar sein. Der hohle Drehantrieb kann die Positionierung der Trägheitslast in kurzer Zeit realisieren.
Der Arbeitstisch, der Maschinenarm oder eine andere Last können direkt auf der hohlen Drehausgangsstufe installiert werden. Daher werden die Befestigungskomponenten wie die Kupplung, die Kraftübertragungskomponenten wie die Riemenscheibe und die Wartung nicht alle benötigt.
Eine hochpräzise Positionierung ohne Spiel ermöglicht eine hochpräzise Positionierung innerhalb einer Leerlaufbewegung von 2 '(0,033 Grad).
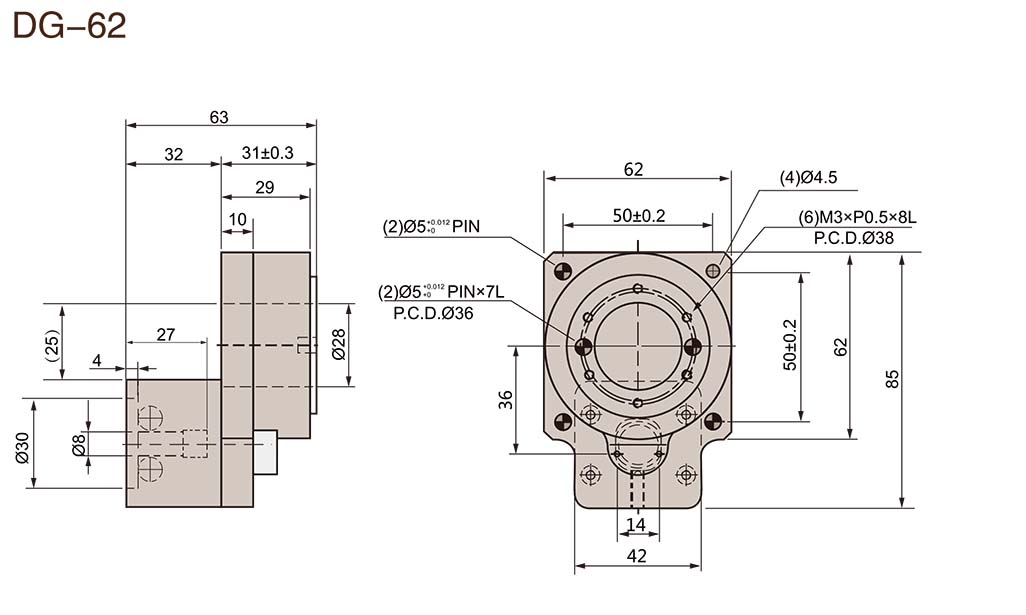
Die Ausgangsstufe mit hohler Struktur mit großem Durchmesser hat eine hohle Struktur mit einem Durchmesser von 28 mm. Daher kann die Konstruktion Ihres Geräts vereinfacht und der Installationsraum gespart werden, indem die hohlen Teile durch Rohre und Drähte gekreuzt werden.
Schnelle Reaktion und hohe Zuverlässigkeit. Der Schrittmotor des hohlen Drehantriebs der Serie DG erlaubt keine Positionierungsfehler, selbst wenn sich die Last plötzlich ändert. Die Drehzahl und die Lautstärke werden während des Betriebs überwacht und die Reaktionsverzögerung wird korrigiert und der Betrieb des DG-Stellantriebs wird innerhalb des maximalen Betriebsdrehmomentbereichs fortgesetzt, wenn die Möglichkeit eines Schrittverlusts infolge einer Überlastung erkannt wird.
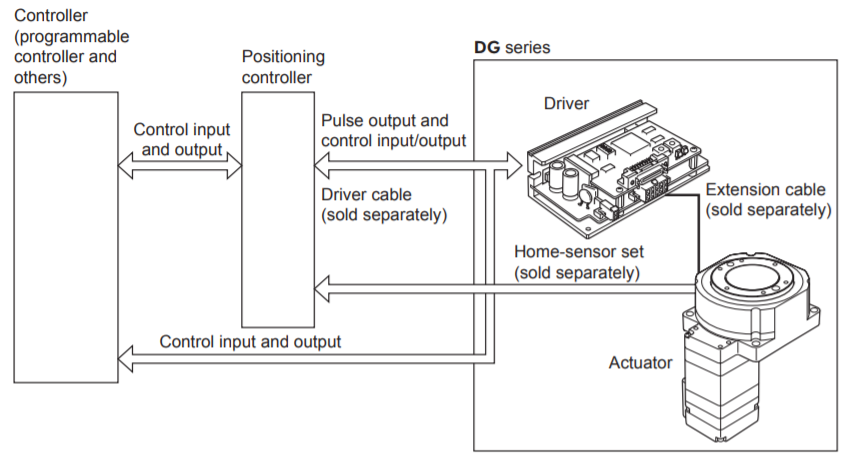
Konstruktionssystem der DG Hohldrehantrieb
Hinweis: Für den Betrieb des hohlen Untersetzungsgetriebes der DG-Serie ist eine Steuerung mit Impulsausgangsfunktion erforderlich.
EINAnwendung von DG Hollow RotAktuator
- CNC-Indexiergerät
- Roboterarmgelenke
- Vierte Bearbeitungsachse der Werkzeugmaschine
- Militärradar
- Automatische Produktionslinie
Gemeinsame Bauformen
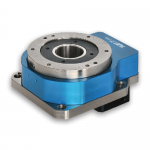
- DirectType: CR
Die Motorwelle ist konzentrisch zur Mittelachse des Drehtellers und wird als direkte Drehplattform bezeichnet
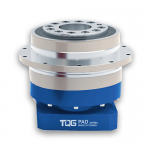
- Seitlich montierter Typ: SR
Die Motorwelle, die parallel zur Mittelachse des Drehtellers liegt, wird als seitlicher Drehantrieb bezeichnet.
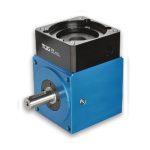
- Paraxialtyp: RR
Die Motorwelle und die Mittelachse des Drehtellers befinden sich in einem 90-Grad-Winkel und werden als Paraxial-Drehtisch bezeichnet.
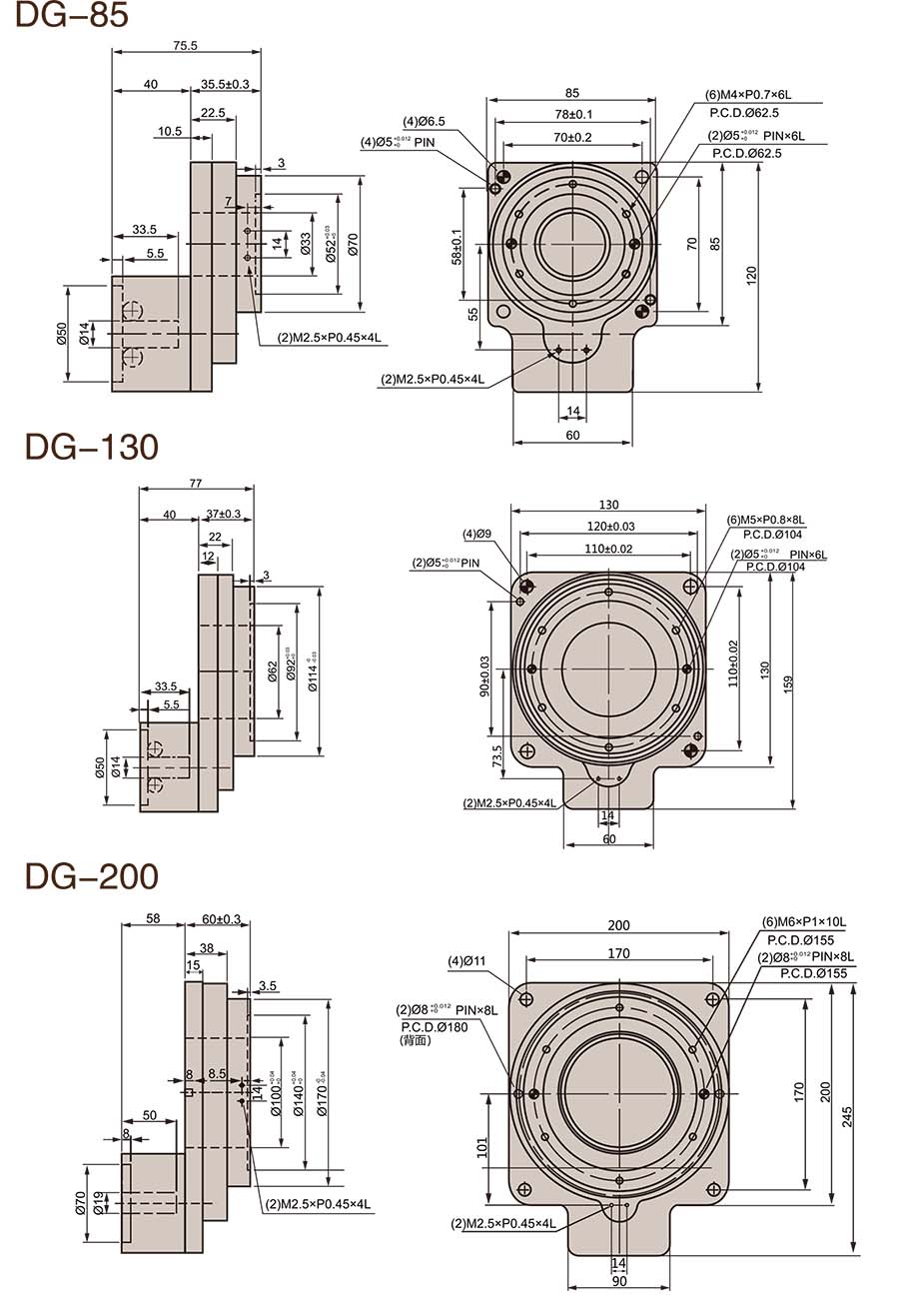
| Spezifikation | Einheit | DG-62 | DG-85 | DG-130 | DG-200 |
| Passender Servomotor | W | 100W | 200-400W | 200-400W | 750-1000W |
| Zulässiges Drehmoment | Nm | 3.5 | 20 | 20 | 65 |
| Rotierende Trägheit | kgm2 | 2480*10-6 | 2498*10-6 | 9472*10-6 | 93581*10-6 |
| Zulässige Geschwindigkeit | U / min | 200 | 200 | 200 | 200 |
| Verhältnis | 1/5 | 1/5 | 1/10 | 1/10 | |
| Positionsgenauigkeit | sek | ≤15 | ≤15 | ≤15 | ≤15 |
| Wiederholen Sie die Positionsgenauigkeit | sek | ± 10 | ± 5 | ± 5 | ± 5 |
| Zulässige Schublast | kgf | 20 | 200 | 250 | 500 |
| Zulässige Trägheitslast | Nm | 10 | 60 | 60 | 200 |
| Rundtischparallelität | Äh | ± 5 | ± 2 | ± 2 | ± 2 |
| Koaxialität des Drehtisches | mm | ± 0,01 | ± 0,01 | ± 0,01 | ± 0,01 |
| Gewicht | kg | 2.2 | 3 | 5.5 | 14 |
Verwandte Produkte
 ZK Hohldrehantrieb
ZK Hohldrehantrieb- PADR High Precision rechtwinkliges Flansch-Abtriebs-Planetengetriebe
- PLF Ecomomy Flansch Abtrieb Planetengetriebe
- PAD Hochpräzises Planetengetriebe mit Flanschausgang
- ZR-Winkel-Präzisions-Planetengetriebe
- VRSF Präzisionsplanetengetriebe
- VRL Hochpräzises Planetengetriebe
- PT-2C-K Lenkgetriebe mit doppelter Hohlwelle
- VRS High Torque Hochpräzises Planetengetriebe
- PLE Ecomomy Planetengetriebe