Überblick über ZK Planetengetriebe
Überblick über ZK Planetengetriebe
 Überblick über ZK Planetengetriebe
Überblick über ZK Planetengetriebe- Die rotierende Scheibenoberfläche kann die Arbeitsobjekte direkt arretieren und somit den Komfort des Werkstücktransfers verbessern.
- Ausgestattet mit einem hohlen Design eignet sich die drehbare Plattform zum Verdrahten oder Verrohren.
- Alternativen zu DD-Motor und Nockenteiler.
- Hohe Positioniergenauigkeit. Die wiederholbare Positioniergenauigkeit beträgt ± 15 Sekunden und die Leerlaufgenauigkeit 2 Minuten.
- Direkte Verbindung - einfaches Design stärkt das Vertrauen.
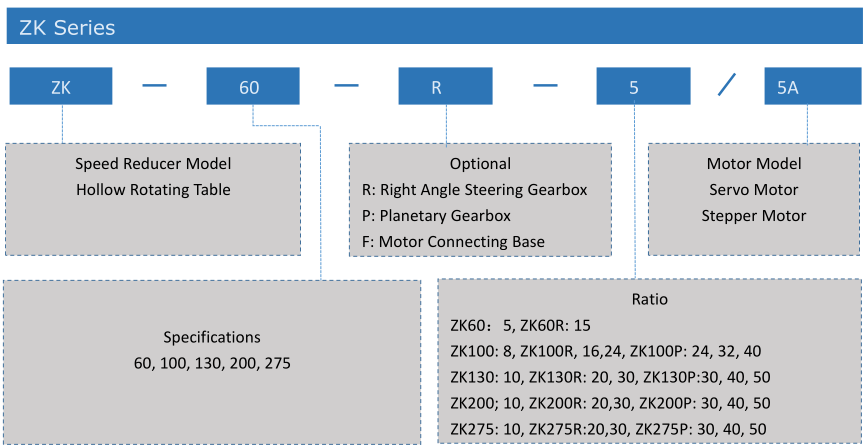
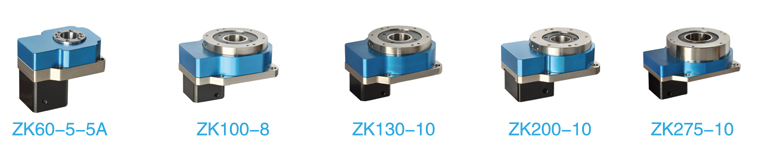
Angabe der Modellnummern von ZK-Hohlrotationsantrieben

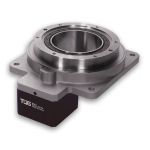
Beschreibung des ZK Hollow Rotary Table
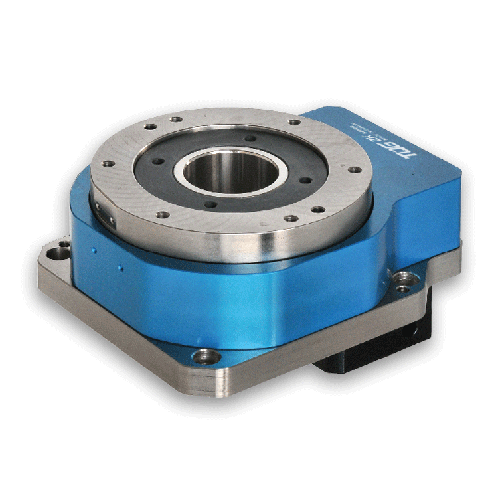
Der hohle Drehantrieb der Serie ZK ist eine neuartige rotierende Lastvorrichtung, die zum Planeten-Servogeschwindigkeitsreduzierer gehört. Die Verwendung von hochsteifen Kreuzrollen-Schrägwälzlagern und Oberflächenintegrationsdesign der Drehplattform kann der großen Trägheit des Plattengeräts, der gesamten Gruppe mit Schrittmotor und Treiber, standhalten. Der hohle Rundtisch Zk vereint die Merkmale hoher Übertragungseffizienz, hoher Präzision, hoher Steifigkeit und hoher Kosteneffizienz. Darüber hinaus hat das ZK-Getriebe die Vorteile von Servomotoren, Nockenteilern und Direktantriebsmotoren integriert.
Bewegungen mit geraden Linien und Kreisbewegungen sind zwei Arten mechanischer Bewegungen. Lineare Bewegungen basieren hauptsächlich auf verschiedenen Arten von Dias, während kreisförmige Bewegungen die repräsentativste Bewegung von Nockenindexierern sind. Und aufgrund der ausgereiften Technologie und der Genauigkeitsanforderungen an die Ausrüstung wird der DD-Motor immer beliebter. Der herkömmliche Splitter war jedoch nicht in der Lage, die Anforderungen einer Segmentierung zu erfüllen. Obwohl der D.D.-Motor auf verschiedene Arten und mit hoher Präzision eingesetzt werden kann, ist sein hoher Preis der Hauptfaktor, der den Benutzer zu einem erneuten Nachdenken veranlasst. Der hohle Drehtisch der ZK-Serie hat erfolgreich ein Gleichgewicht zwischen den Nockenschaltern und dem DD-Motor hergestellt. Es erfüllt die funktionalen Anforderungen, die nicht nur die Kosten des DD-Motors erheblich senken, sondern auch die hochpräzise und digitale Steuerung erfüllen, die der Nockenteiler nicht bieten kann.
Im Drehzahlminderungsmechanismus werden hochpräzise bearbeitete Zahnräder verwendet, um das Spiel durch einen eigenen Einstellmechanismus zu beseitigen, sodass im Teil des Mechanismus kein Spiel auftritt. Da die wiederholte Positioniergenauigkeit ± 15 Sekunden in einer Richtung und die Leerlaufgenauigkeit 2 Minuten in zwei Richtungen beträgt, ist eine Positionierung mit hoher Genauigkeit möglich.
Der Arbeitstisch und der Roboterarm der Ausrüstung können direkt auf der hohlen Ausgabeplattform installiert werden. Wenn die allgemeine Ausrüstung mittels Riemenscheiben und anderen mechanischen Teilen positioniert und betrieben wird. Dies wird hauptsächlich durch die Übertragungseffizienz der mechanischen Teile beeinflusst, weshalb die Genauigkeit verringert wird oder die Teile des Mechanismus gewartet werden müssen. Die hohlen Schwenkantriebe der Serie ZK können direkt ohne Zwischenteile eingebaut werden. Daher kann zusätzlich zur direkten Verwendung der Genauigkeit des Stellglieds selbst eine Wartung vermieden werden.
Anwendung des ZK Hohlrotationsantriebs
- Leichtes Robotergelenk
- Laserbeschriftung oder Drehfutter in Graviermaschine
- Drehwelle im Präzisionsausrichtungsmechanismus
Sechs Hauptanwendungen von ZK Planetengetriebe
1. Trägheitsänderung der Last
2. Hochpräzise Positionierung
3. Trägheitslast Anwendung
4. Hochpräzise Positionierung durch Verwendung eines hohlen Lochs
5.Optimierung der Verwendung eines hohlen Lochs
6.Aufnahme eines hohlen Lochs
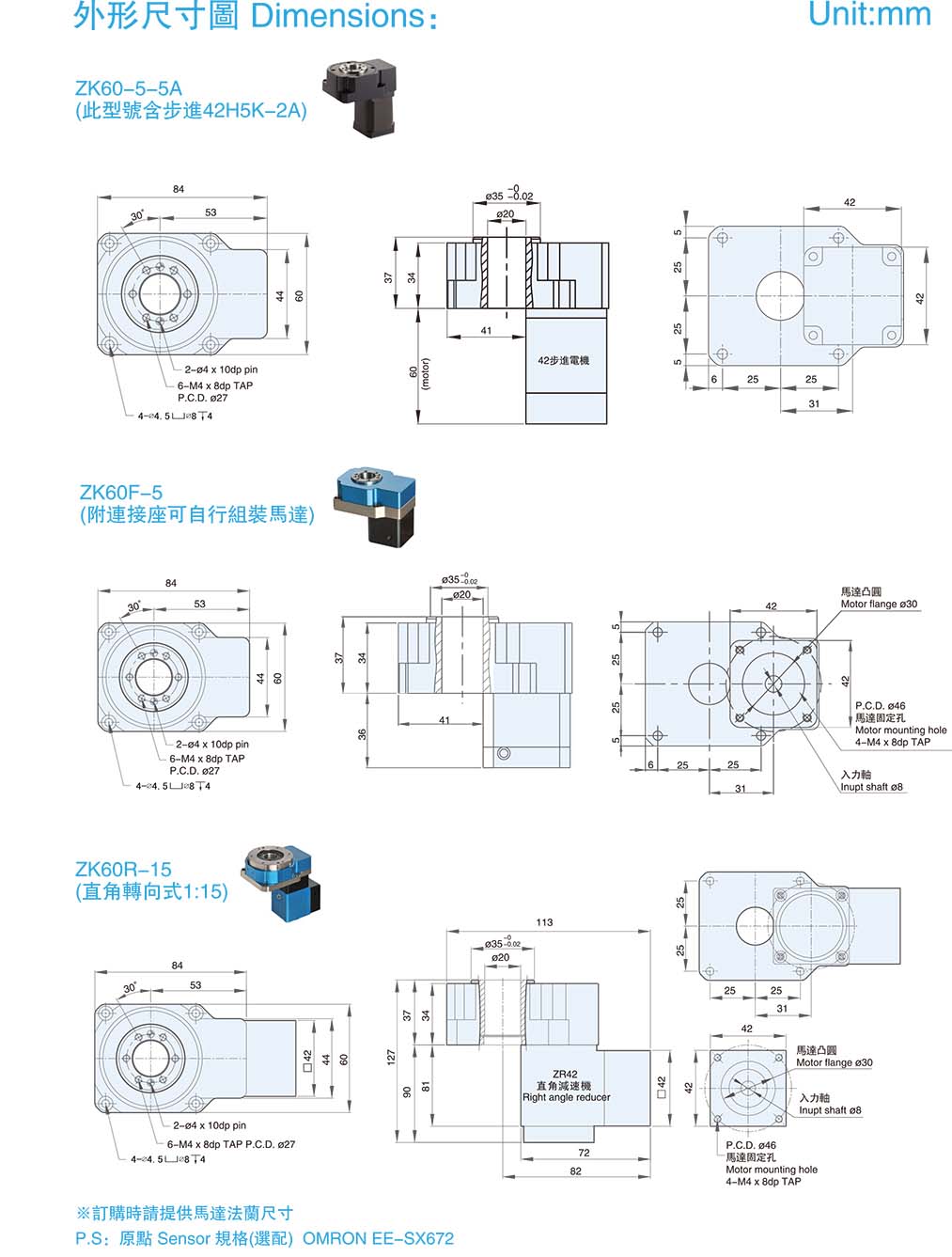
| Modell | ZK60 | ZK60R |
| Lager des Drehtisches | Rillenkugel + Axial-Kugellager | |
| Zulässiges Drehmoment | 5 | |
| Präzisionslebensdauer | 15000 Stunden | |
| Zulässige Geschwindigkeit (U / min) | 200 (Platte) | |
| Verhältnis | 5 | 15 |
| Wiederholungsgenauigkeit (Bogensekunden) | ≤15 | ≤20 |
| Positionsgenauigkeit (Bogenminuten) | ≤1 | ≤1 |
| Parallelität der Drehteller mm | ≤ 0,02 | |
| Koaxialität der Drehteller mm | ≤ 0,02 | |
| Schutzklasse | IP40 | |
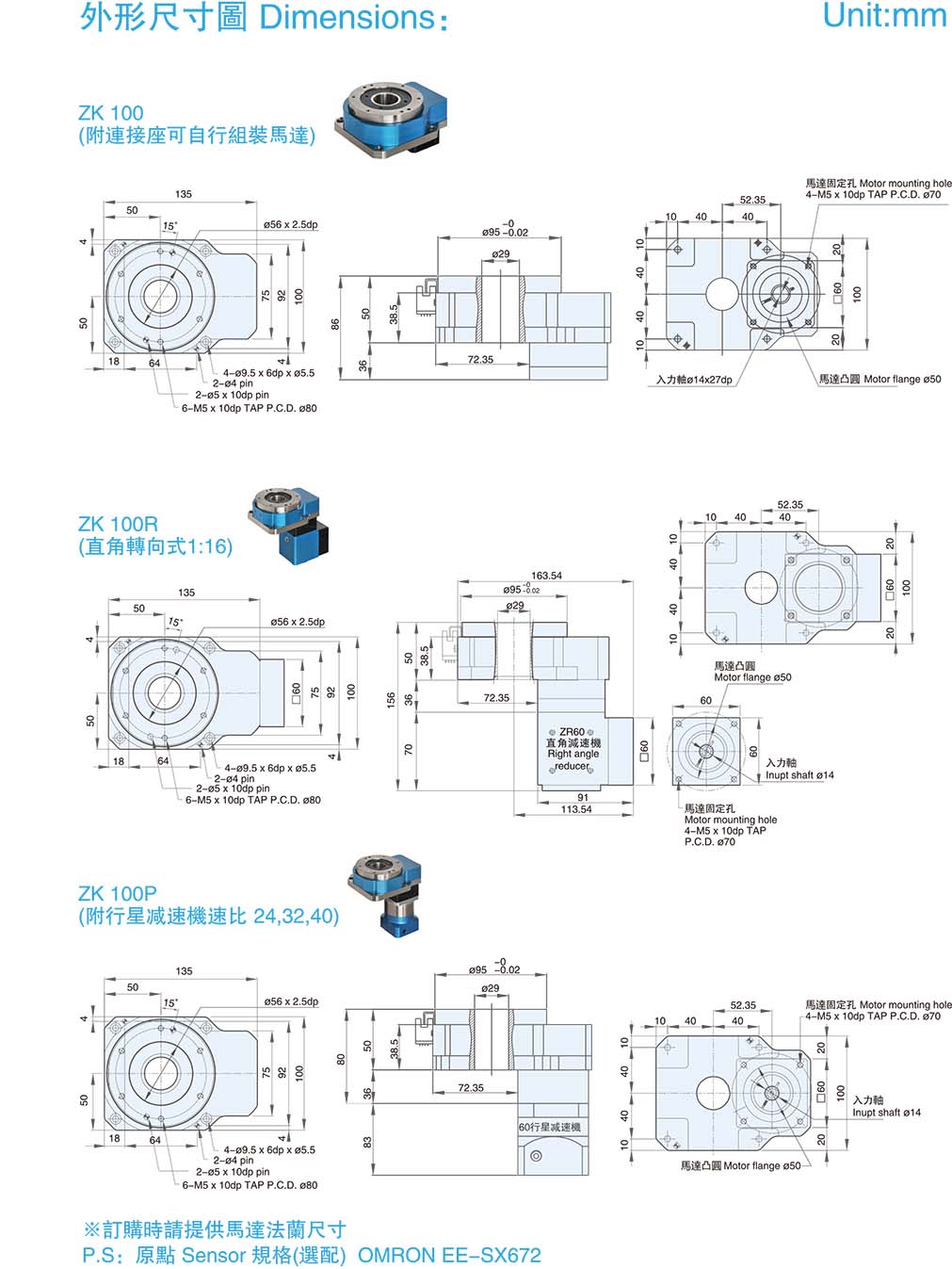
| Modell | ZK100 | ZK100R | ZK100P |
| Lager des Drehtisches | Kegelrollenlager | ||
| Zulässiges Drehmoment | 45 | ||
| Präzisionslebensdauer | 20000Hrs | ||
| Zulässige Geschwindigkeit (U / min) | 200 (Platte) | ||
| Verhältnis | 8 | 16,24 | 24,32,40 |
| Wiederholungsgenauigkeit (Bogensekunden) | ≤10 | ≤20 | ≤60 |
| Positionsgenauigkeit (Bogenminuten) | ≤1 | ≤1 | ≤2 |
| Parallelität der Drehteller mm | ≤ 0,02 | ||
| Koaxialität der Drehteller mm | ≤ 0,015 | ||
| Schutzklasse | IP40 | ||
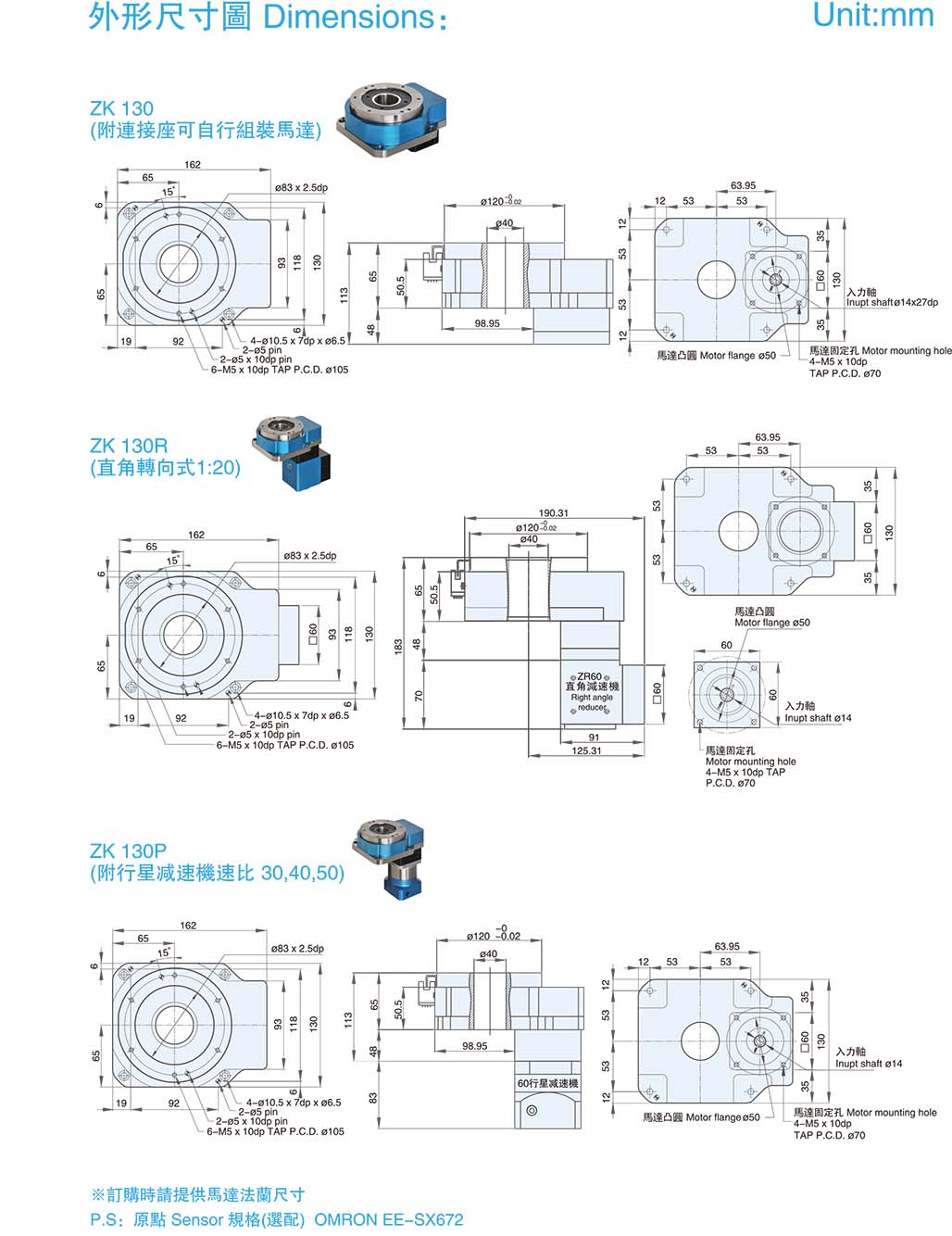
| Modell | ZK130 | ZK130R | ZK130P |
| Lager des Drehtisches | Kegelrollenlager | ||
| Zulässiges Drehmoment | 45 | ||
| Präzisionslebensdauer | 20000Hrs | ||
| Zulässige Geschwindigkeit (U / min) | 200 (Platte) | ||
| Verhältnis | 10 | 20,30 | 30,40,50 |
| Wiederholungsgenauigkeit (Bogensekunden) | ≤10 | ≤20 | ≤60 |
| Positionsgenauigkeit (Bogenminuten) | ≤1 | ≤1 | ≤2 |
| Parallelität der Drehteller mm | ≤ 0,02 | ||
| Koaxialität der Drehteller mm | ≤ 0,015 | ||
| Schutzklasse | IP40 | ||
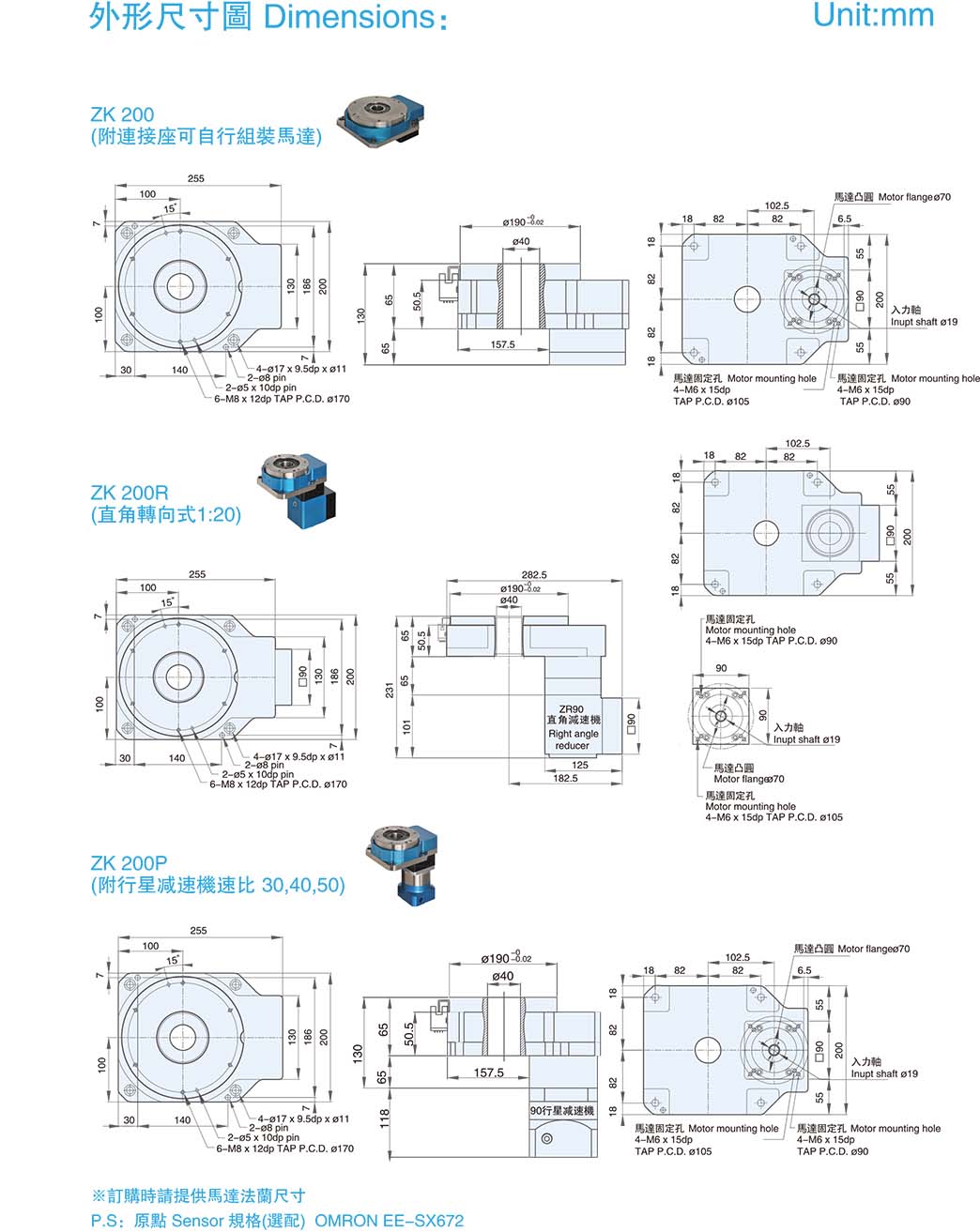
| Modell | ZK200 | ZK200R | ZK200P |
| Lager des Drehtisches | Kegelrollenlager | ||
| Zulässiges Drehmoment | 80 | ||
| Präzisionslebensdauer | 20000Hrs | ||
| Zulässige Geschwindigkeit (U / min) | 200 (Platte) | ||
| Verhältnis | 10 | 20,30 | 30,40,50 |
| Wiederholungsgenauigkeit (Bogensekunden) | ≤10 | ≤20 | ≤60 |
| Positionsgenauigkeit (Bogenminuten) | ≤1 | ≤1 | ≤2 |
| Parallelität der Drehteller mm | ≤ 0,02 | ||
| Koaxialität der Drehteller mm | ≤ 0,015 | ||
| Schutzklasse | IP40 | ||
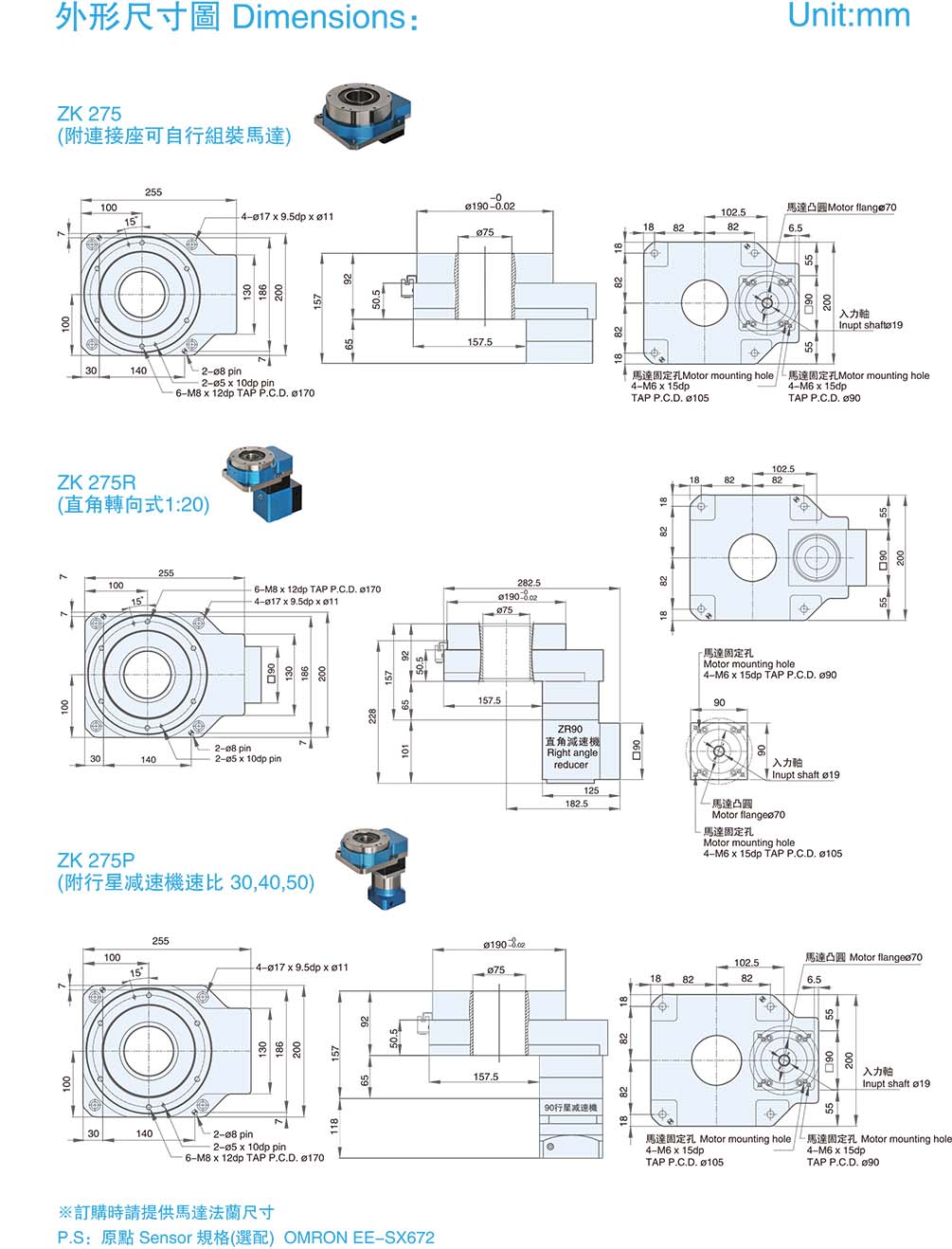
| Modell | ZK275 | ZK275R | ZK275P |
| Lager des Drehtisches | Kegelrollenlager | ||
| Zulässiges Drehmoment | 80 | ||
| Präzisionslebensdauer | 20000Hrs | ||
| Zulässige Geschwindigkeit (U / min) | 200 (Platte) | ||
| Verhältnis | 10 | 20,30 | 30,40,50 |
| Wiederholungsgenauigkeit (Bogensekunden) | ≤10 | ≤20 | ≤60 |
| Positionsgenauigkeit (Bogenminuten) | ≤1 | ≤1 | ≤2 |
| Parallelität der Drehteller mm | ≤ 0,02 | ||
| Koaxialität der Drehteller mm | ≤ 0,015 | ||
| Schutzklasse | IP40 | ||





Verwandte Produkte
 DG Hohldrehantrieb
DG Hohldrehantrieb- PADR High Precision rechtwinkliges Flansch-Abtriebs-Planetengetriebe
- VRL Hochpräzises Planetengetriebe
- PFR rechtwinkliges Präzisionsplanetengetriebe
- PAR Präzisions-Winkelplanetengetriebe
- PAD Hochpräzises Planetengetriebe mit Flanschausgang
- PLF Ecomomy Flansch Abtrieb Planetengetriebe
- VRS High Torque Hochpräzises Planetengetriebe
- VRSF Präzisionsplanetengetriebe
- PLE Ecomomy Planetengetriebe