Overview of Σειρά FHA-E Robot Reducer
Overview of Σειρά FHA-E Robot Reducer
 Overview of Σειρά FHA-E Robot Reducer
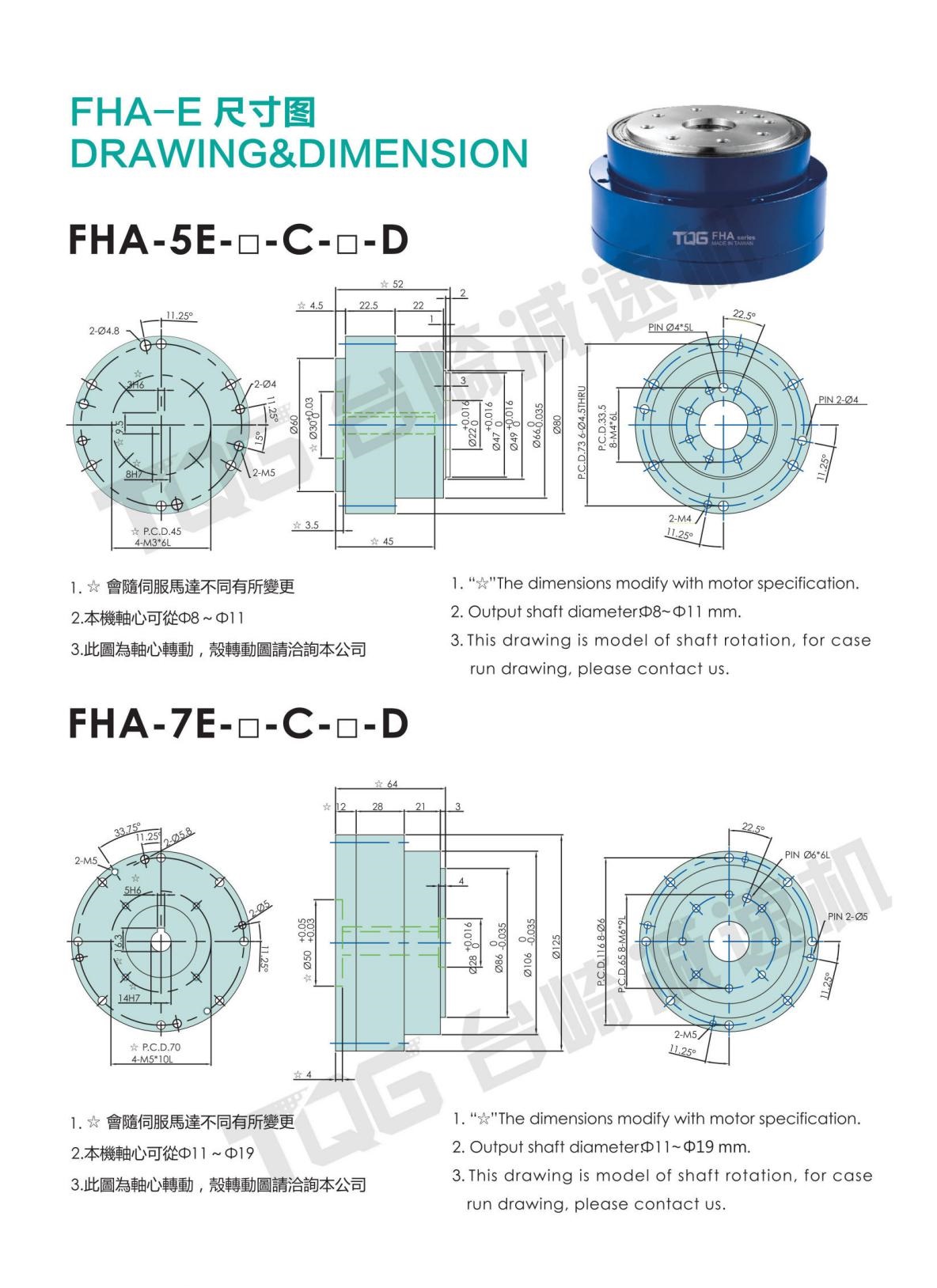
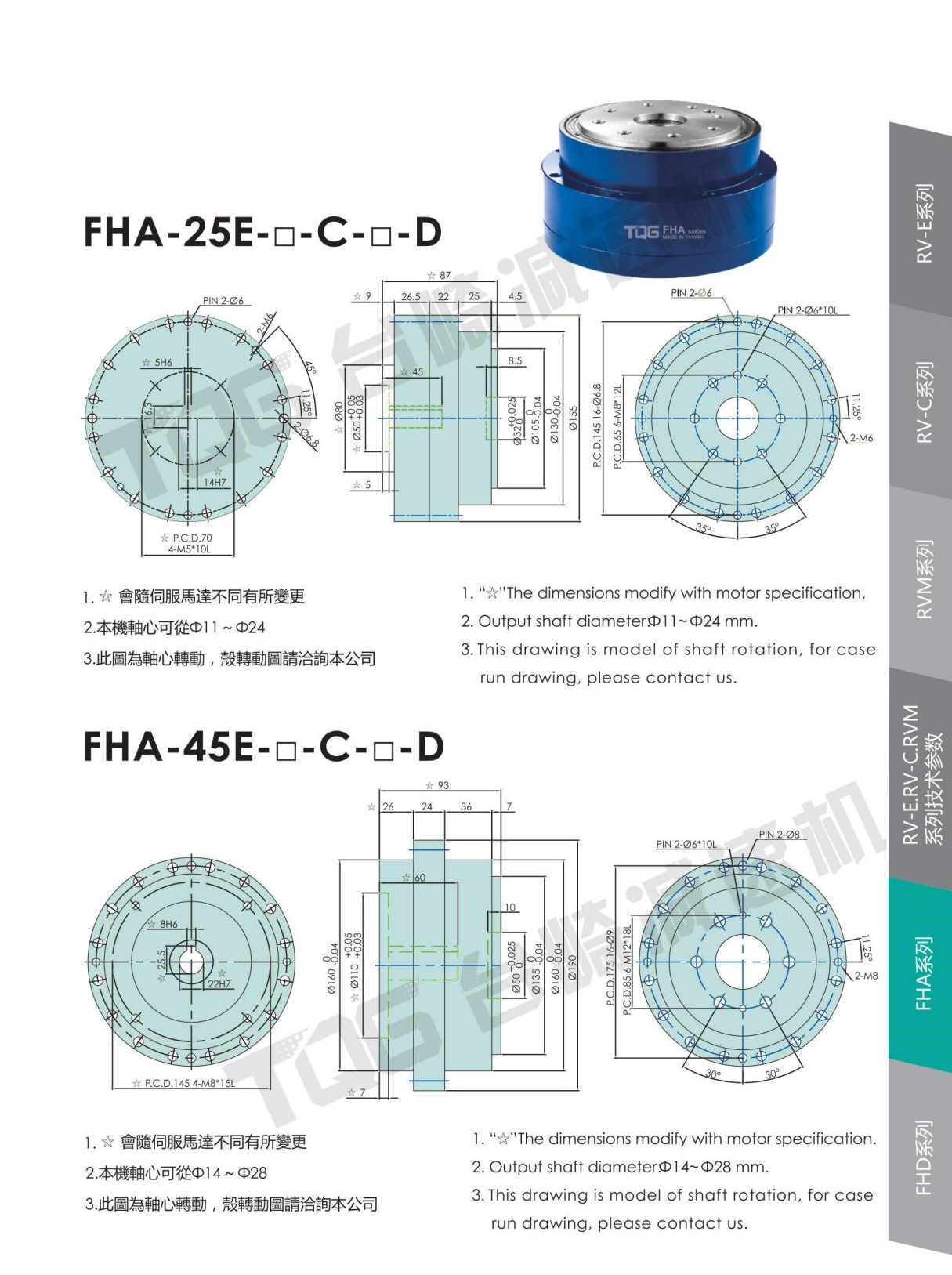
Overview of Σειρά FHA-E Robot Reducer- Τύπος: FHA-5E ~ FHA-450E
- Οπισθία: ≤1-5 Arc.min
- Αναλογία: 1/35 ~ 1/140
- Χωρητικότητα: 0.1kw ~ 15kw
- Περιστροφή: Τρέξιμο άξονα ή ηλιοφάνεια
- Ονομαστική ροπή εξόδου: 60Nm ~ 5100Nm
- Άμεση έξοδος, στενή δέσμευση και υψηλή ακρίβεια
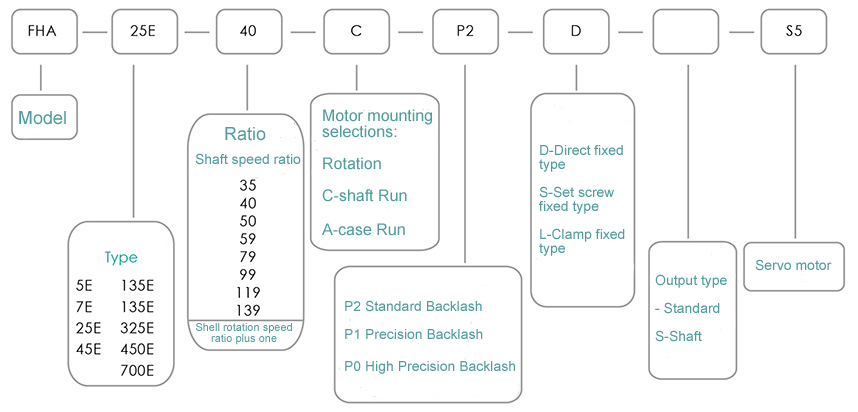
Ένδειξη του Σειρά FHA-E Robot Reducer
Περιγραφή του Σειρά FHA-E Robot Reducer
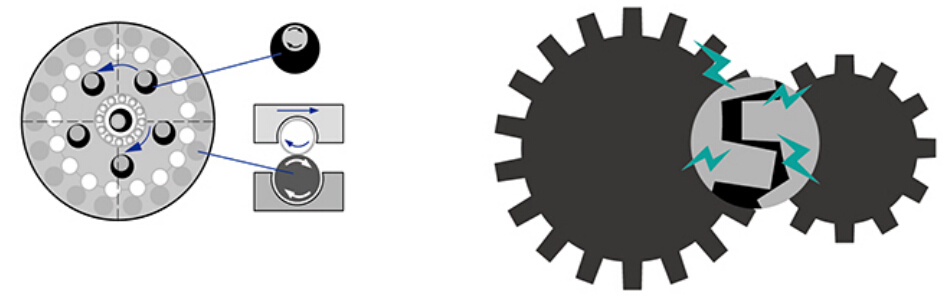
■ Η ικανότητα φόρτισης του φορτίου του κιβωτίου ταχυτήτων FHA-E ενισχύεται σημαντικά με την υιοθέτηση τεχνολογίας αποκεντρωμένης φόρτισης πολλαπλών σχέσεων μετάδοσης κίνησης. Ενώ οι παραδοσιακοί οδοντωτοί τροχοί ή ελικοειδείς οδοντωτοί τροχοί πρέπει να αντέχουν στην πρόσκρουση υπερφόρτωσης λόγω της εμπλοκής εμπλοκής μόνο ενός δοντιού.

■ Εξαιρετικά υψηλή απόδοση επιτυγχάνεται χάρη στην κίνηση των εξωτερικών & εσωτερικών κυλίνδρων που εμπλέκονται στην ολίσθηση και την αυτο-περιστροφή. Ενώ στους παραδοσιακούς μηχανισμούς, η άσχημη μετάδοση ροπής που προκαλείται από την τριβή ή την παρεμβολή των γραναζιών.
■ Δημιουργική μετάδοση, εξαιρετικά πλεονεκτήματα
Η σειρά FHA-E Robot Reducer παρέχει όλα τα πλεονεκτήματα του αρμονικού κιβωτίου ταχυτήτων αρνητικά στις ελλείψεις του flexspline.
Χωρίς αύξηση των σταδίων του μειωτήρα, το κιβώτιο ταχυτήτων FHA-E μπορεί να παρέχει υψηλές αναλογίες λόγω του πλανητικού μηχανισμού μετάδοσης κίνησης. Ο κυκλοφορητής παρέχει υψηλή χωρητικότητα φόρτωσης χωρίς προφανείς κραδασμούς.
■ Υψηλή απόδοση με χαμηλή απώλεια ολίσθησης
Όλα τα συρόμενα στοιχεία αποτελούνται από ρολό. Όταν ο κύλινδρος κυλίεται, εμπλέκεται και η ολίσθηση και επομένως η απώλεια του μηχανισμού σχεδόν αγνοείται και αποκτά ανώτερη υψηλή απόδοση έως και 95% κάτω από μία μόνο μείωση.
■ Ομαλή λειτουργία με χαμηλό θόρυβο
Η σειρά FHA-E Robot Reducer παρέχει τη δέσμευση πολλαπλών δοντιών, ταυτόχρονα, αντισταθμισμένη κατασκευή διπλών δίσκων με δόνηση μετατόπισης, υψηλό συντελεστή επικάλυψης και επαφή κυλίνδρου με κατάλληλο διάκενο για την αποφυγή παρεμβολών όπως γρανάζια, που θα μπορούσαν να μειώσουν τον θόρυβο και οι δονήσεις αποτελεσματικά.
■ Υψηλή ακρίβεια με χαμηλή αντίδραση
Σχεδόν μηδενική χαλάρωση του μειωτή ρομπότ FHA-E χάρη στην εμπλοκή πολλαπλών δοντιών και ως εκ τούτου η απόκλιση μεταδόσεως είναι μόνο 25% του παραδοσιακού μειωτήρα μετάδοσης κίνησης.
■ Υψηλή ροπή εξόδου λόγω της μεγάλης διαμέτρου του διεγέρτη κύματος
Η υψηλότερη ροπή του μειωτήρα ρομπότ FHA-E λόγω της μεγαλύτερης διαμέτρου κυλινδρικού κύματος μετάδοσης κυλίνδρων από τον παραδοσιακό δίσκο λόγω του κανονικού χαρακτηριστικού του κύματος κύλισης.
■ Συμπαγής κατασκευή με υψηλή αναλογία
Μονοβάθμιο εργαλείο ρομπότ FHA-E μπορεί να επιτύχει υψηλή αναλογία, επειδή η ποσότητα των κυλίνδρων στον δίσκο κυλίνδρων είναι ίση με την αναλογία. Ο άξονας εξόδου και ο άξονας εισόδου του μειωτήρα ρομπότ FHA-E είναι σε σειρά, η δομή του οποίου είναι ενισχυμένη και εξοικονομεί χώρο, με αποτέλεσμα η διάσταση να είναι πιο συμπαγής κάτω από την ίδια αναλογία μείωσης μειωτήρα και μειωτήρα σκουληκιών.
■ Η εμπλοκή πολλαπλών δοντιών συμβάλλει στην υψηλή ικανότητα φόρτωσης
Σε σύγκριση με τη συμπλοκή ενός οδοντωτού μειωτήρα σπειρώματος με γρανάζι ή μειωτήρα ταχυτήτων, το κιβώτιο ρομπότ FHT-A χαρακτηρίζεται από το 50% των κυλίνδρων που εμπλέκουν ταυτόχρονα τη σύνδεση του μηχανισμού κυλίνδρων με δύο δίσκους, επομένως η χωρητικότητα φορτίου είναι υψηλότερη από τον παραδοσιακό μειωτήρα ταχύτητας.
■ Το δόντι του κυλίνδρου συμβάλλει στη μεγάλη διάρκεια ζωής του
Γενικά robust μηχανισμό, χωρίς συντήρηση και μεγάλη διάρκεια ζωής λόγω της δημιουργικής κίνησης κυλίνδρων, εξαιρετική τεχνολογία και διαδικασία, ειδικό περιτύλιγμα κυλίνδρων χωρίς σπασμένα δόντια.
■ Καλύτερο οικονομικό όφελος λόγω της χαμηλής κατανάλωσης ενέργειας
Χαρακτηριστικά μειωτήρα ρομπότ FHA-E υψηλής απόδοσης ροπής, υψηλή απόδοση, χαμηλό φορτίο λειτουργίας, χαμηλή κατανάλωση ενέργειας και υψηλότερο οικονομικό όφελος.
■ Κοίλη σχεδίαση για άμεση έξοδο
Ο μειωτήρας FHA-E RV είναι σχεδιασμένος φιλικά με τον κοίλο άξονα και επιτρέπει τη συσσώρευση των υδραυλικών σωλήνων δρομολόγησης και του ηλεκτρικού καλωδίου μέσω του μειωτήρα FHA-E. Και είναι εύκολο να τοποθετήσετε τον κινητήρα μέσω του συνδέσμου και της φλάντζας του κινητήρα.
| Μοντέλο | FHA-5Ε | FHE-7E | FHA-25Ε | FHA-45E | ||||||
| Περιστροφή | Αξονας Τρέξιμο | Υπόθεση Τρέξιμο | Αξονας Τρέξιμο | Υπόθεση Τρέξιμο | Αξονας Τρέξιμο | Υπόθεση Τρέξιμο | Αξονας Τρέξιμο | Υπόθεση Τρέξιμο | ||
| Αναλογία | 40 | 41 | 40 | 41 | 40 | 41 | 35 | 36 | ||
| 50 | 51 | 50 | 51 | 50 | 51 | 40 | 41 | |||
| * | * | 59 | 60 | 60 | 61 | 50 | 51 | |||
| * | * | * | * | * | * | 59 | 60 | |||
| * | * | * | * | * | * | 79 | 80 | |||
| Ονομαστική ροπή εξόδου | Nm kgf-m | 60 (6.1) | 83 (8.46) | 245 (25) | 460 (46.8) | |||||
| Επιτάχυνση & ροπή πέδησης | Nm kgf-m | 97.5 (9.9) | 136 (14) | 515 (52) | 1158 (118) | |||||
| Στιγμιαία μέγιστη ροπή | Nm kgf-m | 245 (25) | 415 (42) | 1000 (102) | 2300 (234.4) | |||||
| Ονομαστική ταχύτητα εισόδου | Αριθ (rpm) | 2000 | 2000 | 2000 | 2000 | |||||
| Ονομαστική διάρκεια ζωής | Hr | 6000 | 6000 | 6000 | 6000 | |||||
| Επιτρεπόμενη μέγιστη ταχύτητα εισόδου | Nmax (rpm) | 3000 | 3000 | 3000 | 2500 | |||||
| Ανυψωτική ακαμψία | Nm / arcmin kgf-m / arcmin | 82 (8.3) | 117 (12) | 372 (38) | 931 (95) | |||||
| Στρεπτική ακαμψία | Nm / arcmin kgf-m / arcmin | 18 (1.83) | 20 (2) | 49 (5) | 108 (11) | |||||
| Μέγιστη κίνηση κίνησης | (arcmin) | <3.0 | <3.0 | <3.0 | <3.0 | |||||
| Σφάλμα μετάδοσης γωνίας | ATE (arcsec) | 40 | 80 | 40 | 40 | |||||
| Αντίστροφη μέτρηση | Πρότυπη αντιπαράθεση | (arcmin) | <5.0 | <5.0 | <5.0 | <5.0 | ||||
| Αντίσταση ακρίβειας | <3.0 | <3.0 | <3.0 | <3.0 | ||||||
| Αντίσταση υψηλής ακρίβειας | * | * | * | <1.0 | ||||||
| Μέγιστη ροπή σφράγισης | Nm kgf-m | 282 (28.8) | 392 (40) | 1764 (180) | 3332 (340) | |||||
| Ονομαστική ακτινική δύναμη | Nm | 118 | 196 | 882 | 1666 | |||||
| Μέγιστη αξονική δύναμη | Ν | 885 | 1470 | 3920 | 5194 | |||||
| (Ι = GD2/ 4) Αδράνεια εισόδου Kg-m2 | 1,65x10-6 | 2.60x10-6 | 1,08χ10-6 | 4.50x10-6 | ||||||
| 1,46x10-6 | 1,85χ10-6 | 0,65x10-6 | 3.75χ10-6 | |||||||
| * | 1,66x10-6 | 0,45x10-6 | 2,4x10-6 | |||||||
| * | * | * | 1,75χ10-6 | |||||||
| * | * | * | 2,4x10-6 | |||||||
| Βάρος | ΚΙΛΟ | 4.5 | 8.5 | 12 | 32.5 | |||||
| Περιστροφή | Αξονας Τρέξιμο | Υπόθεση Τρέξιμο | Αξονας Τρέξιμο | Υπόθεση Τρέξιμο | Αξονας Τρέξιμο | Υπόθεση Τρέξιμο | Αξονας Τρέξιμο | Υπόθεση Τρέξιμο | ||
| Αναλογία | 50 | 51 | 50 | 51 | 59 | 60 | 59 | 60 | ||
| 60 | 61 | 60 | 61 | 79 | 80 | 79 | 80 | |||
| 79 | 80 | 79 | 80 | 99 | 100 | 99 | 100 | |||
| 99 | 100 | 99 | 100 | 119 | 120 | 119 | 120 | |||
| * | * | * | * | * | * | 139 | 140 | |||
| Ονομαστική ροπή εξόδου | Nm kgf-m | 1400 (136) | 1615 (165) | 3595 (366) | 5100 (520) | |||||
| Επιτάχυνση & ροπή πέδησης | Nm kgf-m | 2083 (212) | 4043 (412) | 7963 (812) | 11025 (1125) | |||||
| Στιγμιαία μέγιστη ροπή | Nm kgf-m | 4155 (423.5) | 8075 (823) | 17975 (1830) | 25500 (2600) | |||||
| Ονομαστική ταχύτητα εισόδου | Αριθ (rpm) | 2000 | 1500 | 1500 | 1500 | |||||
| Ονομαστική διάρκεια ζωής | Hr | 6000 | 6000 | 6000 | 6000 | |||||
| Επιτρεπόμενη μέγιστη ταχύτητα εισόδου | Nmax (rpm) | 2500 | 2500 | 2000 | 2000 | |||||
| Ανυψωτική ακαμψία | Nm / arcmin kgf-m / arcmin | 1176 (120) | 2940 (300) | 4900 (500) | 7448 (760) | |||||
| Στρεπτική ακαμψία | Nm / arcmin kgf-m / arcmin | 196 (20) | 392 (40) | 980 (100) | 1176 (120) | |||||
| Μέγιστη κίνηση κίνησης | (arcmin) | <1.5 | <1.5 | <1.5 | <1.5 | |||||
| Σφάλμα μετάδοσης γωνίας | ATE (arcsec) | 40 | 40 | 40 | 40 | |||||
| Αντίστροφη μέτρηση | Πρότυπη αντιπαράθεση | (arcmin) | <4.0 | <4.0 | <4.0 | <4.0 | ||||
| Αντίσταση ακρίβειας | <2.0 | <2.0 | <2.0 | <2.0 | ||||||
| Αντίσταση υψηλής ακρίβειας | <1.0 | <1.0 | <1.0 | <1.0 | ||||||
| Μέγιστη ροπή σφράγισης | Nm kgf-m | 4312 (440) | 7840 (800) | 14112 (1440) | 17640 (1800) | |||||
| Ονομαστική ακτινική δύναμη | Nm | 2156 | 3920 | 7056 | 8820 | |||||
| Μέγιστη αξονική δύναμη | Ν | 7840 | 14700 | 19600 | 24500 | |||||
| (Ι = GD2/ 4) Αδράνεια εισόδου Kg-m2 | 5.65x10-5 | 1,9x10-4 | 6x10-4 | 9x10-4 | ||||||
| 4.40x10-5 | 1,8χ10-4 | 5.4x10-4 | 7.3χ10-4 | |||||||
| 3,53x10-5 | 1,78x10-4 | 4x10-4 | 6x10-4 | |||||||
| 2,63χ10-5 | 1,51χ10-4 | 2.8x10-4 | 4.8x10-4 | |||||||
| * | * | * | 4.2χ10-4 | |||||||
| Βάρος | ΚΙΛΟ | 32.5 | 37 | 65 | 81 | |||||


Σχετικά προϊόντα
 RV-E Σειρά ρομπότ
RV-E Σειρά ρομπότ- Σειρά FOB-C σειράς ρομπότ
- RV-M Σειρά ρομπότ
- RV-C Σειρά ρομπότ
- Σειρά SHD Harmonic
- PC-NMRV Gear Motor
- Συγκρότημα αρμονικών κιβωτίων συνιστωσών CSG / CSF
- Πλανητικό κιβώτιο ταχυτήτων Right Precision PAR
- Κύρια Δομή Διεργασιών & Πατενταρισμένη Τεχνολογία του Πλανητικού Κιβώτιο Ταχυτήτων TQG
- Πλαίσιο κιβωτίου ταχυτήτων υψηλής ακρίβειας PAD υψηλής απόδοσης