Overview de FHA-E Serio-Robota Reduktanto
Overview de FHA-E Serio-Robota Reduktanto
 Overview de FHA-E Serio-Robota Reduktanto
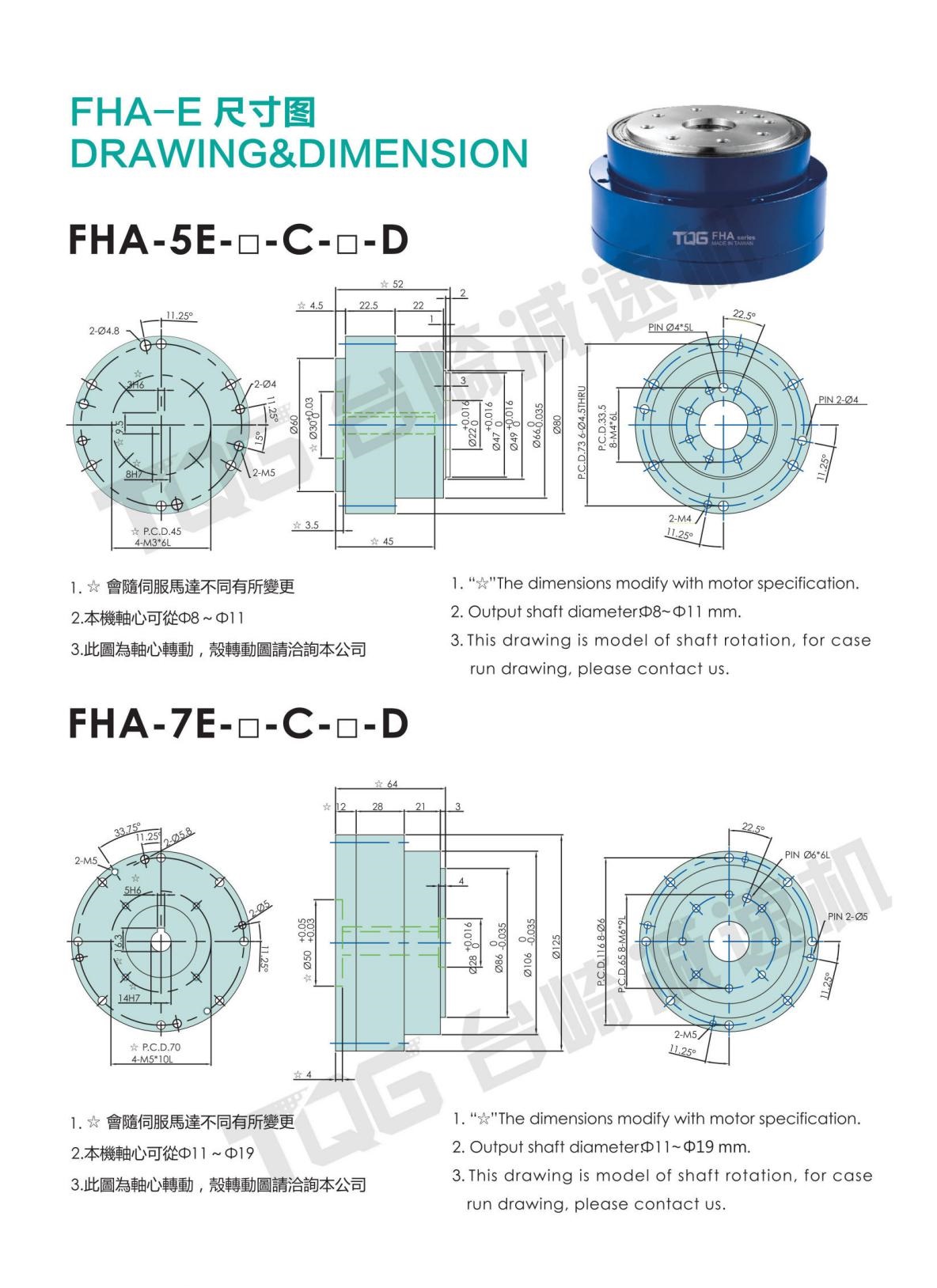
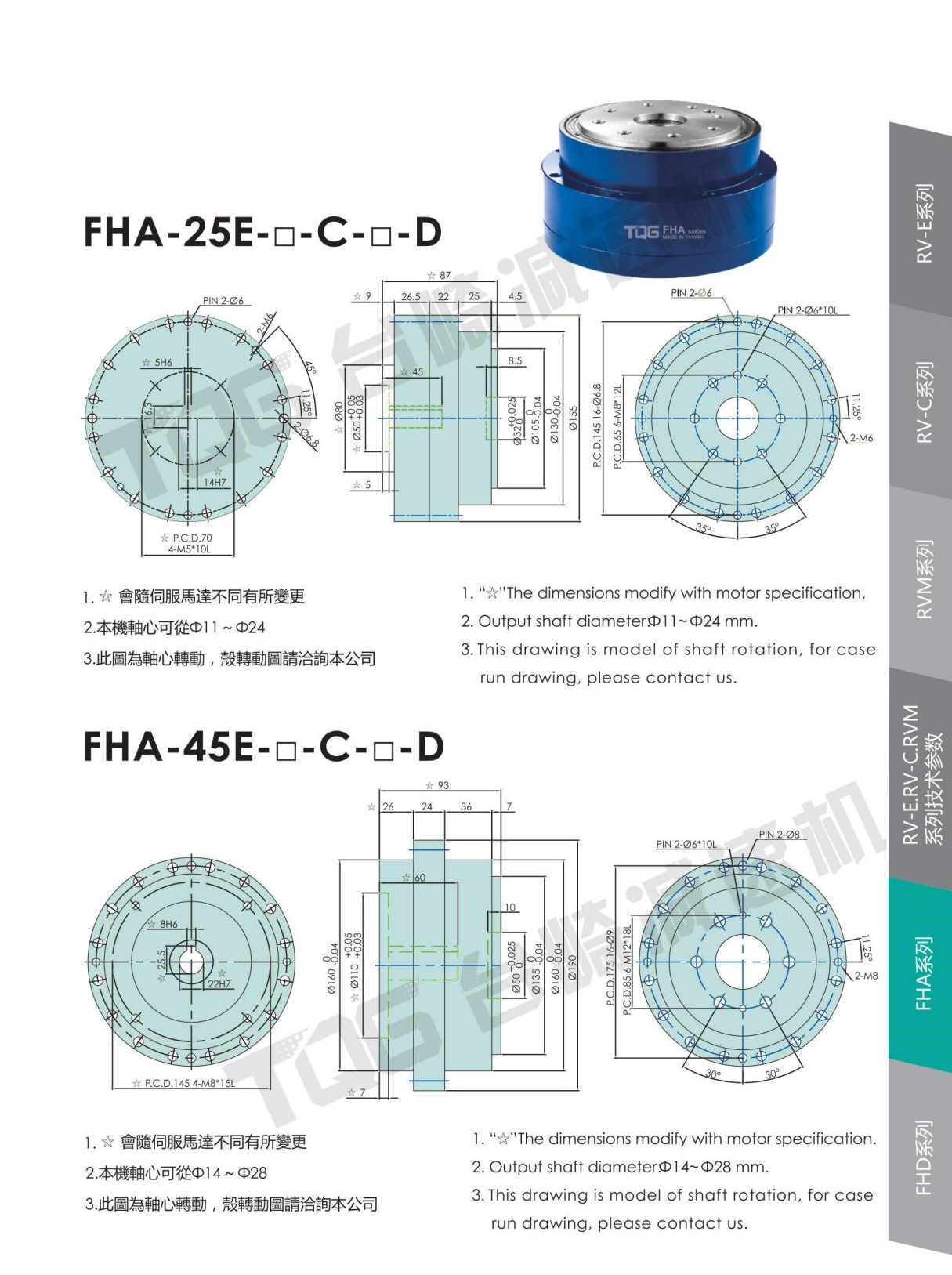
Overview de FHA-E Serio-Robota Reduktanto- Tipo: FHA-5E ~ FHA-450E
- Reago: ≤1-5 Arc.min
- Proporcio: 1/35 ~ 1/140
- Kapablo: 0.1kw ~ 15kw
- Rotacio: Ŝafto kuras aŭ kazo suno
- Taksita eliga paro: 60Nm ~ 5100Nm
- Rekta produktado, strikta engaĝiĝo kaj alta precizeco
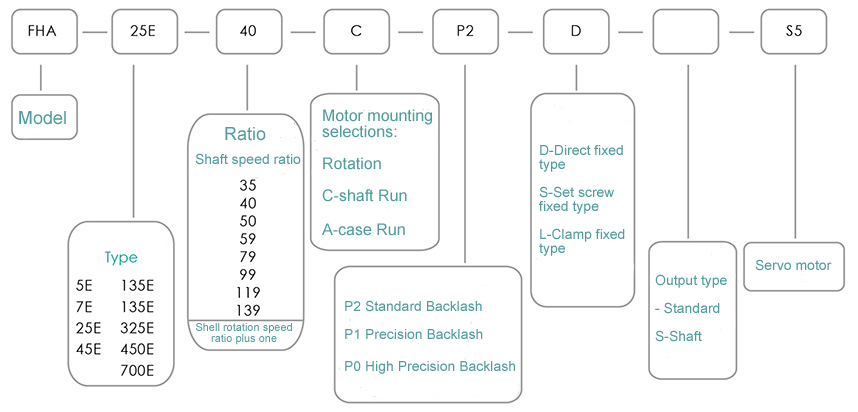
Indiko de FHA-E Serio-Robota Reduktanto
Priskribo de FHA-E Serio-Robota Reduktanto
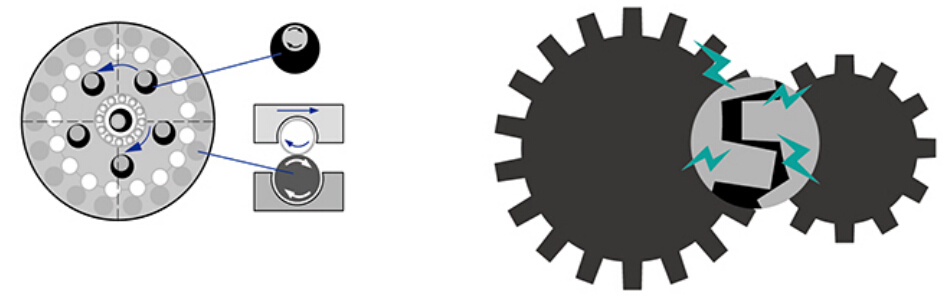
■ La trafo-kapablo DE FHA-E-rapidumilo estas ege plibonigita per adoptado de ŝarĝo-malcentralizita teknologio de multiliga engaĝiĝo. Dum tradiciaj spronaj dentaĵoj aŭ helico-trajnoj devas elteni troŝarĝan efikon pro la enmetaĵa engaĝiĝo de nur unu dento.

■ Ekstreme alta efikeco akiras danke al la movado de eksteraj & internaj ruloj engaĝitaj glitante kaj mem-rotacio. Dum la tradiciaj me ,anismoj, la svelta tordmezura transdono kaŭzas la abrazio aŭ enmiksiĝo de ilaroj.
■ Krea dissendo, elstaraj avantaĝoj
FHA-E-Serio-Robotredaktilo provizas ĉiujn avantaĝojn de harmona transmisiilo, kiuj negativas la malabundon de fleksplano.
Sen pliigi la fazojn de la reduktilo, FHA-E-robota skatolo povas provizi altajn kvocientojn pro la planeda dentaĵo. Kaj cicloida disko provizas altan ŝarĝokapablon sen evidenta vibro.
Alta efikeco kun malalta glitanta perdo
Ĉiuj glitaj elementoj konsistas el rulilo. Kiam la rulilo ruliĝas, glitado ankaŭ estas implikita, kaj tial la mekanika perdo estas preskaŭ ignorata kaj akiris altan altan efikecon ĝis 95% sub nur unu fazo-redukto.
■ Glata funkciado kun malalta bruo
FHA-E-Serio-Robot reduktanto disponigas multi-dentajn retikulajn engaĝiĝojn, samtempe, kontraŭbatalitaj duobla-diskokonstruaĵo de kompensita vibro, alta koincera koeficiento, kaj rula kontakto kun taŭga breĉo por eviti interferon kiel dentaĵoj, kio povus redukti la bruon kaj vibro efike.
■ Alta precizeco kun malalta reago
Preskaŭ nula reago de FHA-E roboto reduktanto danke al la multi-dentoj retikulanta engaĝiĝo, kaj tial la transdono devio estas nur 25% de la tradicia dentaĵo reductor.
■ Alta paro eligo pro longa diametro de ondo ekscito
La pli alta paro de FHA-E-roboto reduktanto pro la pli granda diametro de rulfluo de radoj transdono ol tradicia disko pro la regula trajto de la ondata ondo.
■ Kompakta strukturo kun alta proporcio
Ununura stadia FHA-E robota ilaro povas atingi altan kvocienton ĉar la kvanto de ruloj sur la rulila disko egalas al rilatumo. Elira akso kaj eniga akso de FHA-E robota reduktanto estas en linio, kies strukturo estas plifortigita kaj spaco-ŝparado, tiel la dimensio estas pli kompakta sub la sama redukto rilatumo de ilaro reductor kaj vermo reductor.
■ Multi-dentaj engaĝiĝo kontribuas al altaj ŝarĝeblaj kapabloj
Kompare kun unu dentodeligilo de la vermo-reduktilo aŭ reduktilo reduktanta, FHT-A-robota skatolo estas prezentita kun 50% ruloj meshing-engaĝo samtempe de duobla-diska rulilo mekanismo, tial la ŝarĝa kapacito estas pli alta ol tradicia dentaĵo reductor.
■ Rulara dento kontribuas al longa serva vivo
Totala fortika mekanismo, libera de vivtenado kaj longa serva vivo pro la krea rulveturilo, elstara teknologio kaj procezo, speciala rulilo konturo sen rompitaj dentoj.
Pli bona ekonomia profito pro malalta konsumo de energio
FHA-E-robota reduktilo de alta paro eligo, alta efikeco, malalta funkciado ŝarĝo, malalta energikonsumo kaj pli alta ekonomia profito.
■ Kava dezajno por rekta produktado
FHA-E RV-reduktilo estas desegnita amike kun kava akso kaj permesas aranĝi la vojigajn hidraŭlikajn tubojn kaj elektran kablon tra la FHA-E reductor. Kaj estas facile surmeti la motoron per kunigado kaj motora pordo.
| Modelo | FHA-5E | FHE-7E | FHA-25E | FHA-45E | ||||||
| Rotacio | Ŝafto Kuri | Kazo Kuri | Ŝafto Kuri | Kazo Kuri | Ŝafto Kuri | Kazo Kuri | Ŝafto Kuri | Kazo Kuri | ||
| Proporcio | 40 | 41 | 40 | 41 | 40 | 41 | 35 | 36 | ||
| 50 | 51 | 50 | 51 | 50 | 51 | 40 | 41 | |||
| * | * | 59 | 60 | 60 | 61 | 50 | 51 | |||
| * | * | * | * | * | * | 59 | 60 | |||
| * | * | * | * | * | * | 79 | 80 | |||
| Taksita senda torque | Nm kgf-m | 60 (6.1) | 83 (8.46) | 245 (25) | 460 (46.8) | |||||
| Akcelo kaj bremsita paro | Nm kgf-m | 97.5 (9.9) | 136 (14) | 515 (52) | 1158 (118) | |||||
| Instant Max.allowable-tordo | Nm kgf-m | 245 (25) | 415 (42) | 1000 (102) | 2300 (234.4) | |||||
| Taksita eniga rapido | Nr (rpm) | 2000 | 2000 | 2000 | 2000 | |||||
| Taksita vivdaŭro | Hr | 6000 | 6000 | 6000 | 6000 | |||||
| Permesebla maksona rapido | Nmax (rpm) | 3000 | 3000 | 3000 | 2500 | |||||
| Klinanta rigideco | Nm / arcmin kgf-m / arcmin | 82 (8.3) | 117 (12) | 372 (38) | 931 (95) | |||||
| Tordeca rigideco | Nm / arcmin kgf-m / arcmin | 18 (1.83) | 20 (2) | 49 (5) | 108 (11) | |||||
| Max.lost-movado | (arcmin) | 3.0 | 3.0 | 3.0 | 3.0 | |||||
| Eraro de angula dissendo | ATE (arcsek) | 40 | 80 | 40 | 40 | |||||
| Reago | Norma kontraŭreago | (arcmin) | . 5.0 | . 5.0 | . 5.0 | . 5.0 | ||||
| Preciziga reago | 3.0 | 3.0 | 3.0 | 3.0 | ||||||
| Alta precizeca reago | * | * | * | < 1.0 | ||||||
| Maksimuma tordiĝo | Nm kgf-m | 282 8 28,8 | 392 40 | 1764 180 | 3332 340 | |||||
| Taksita radia forto | Nm | 118 | 196 | 882 | 1666 | |||||
| Maksimuma forto | N | 885 | 1470 | 3920 | 5194 | |||||
| (Mi = GD2/ 4) Enigu inertecon Kg-m2 | 1.65x10-6 | 2.60x10-6 | 1.08x10-6 | 4.50x10-6 | ||||||
| 1.46x10-6 | 1.85x10-6 | 0.65x10-6 | 3.75x10-6 | |||||||
| * | 1.66x10-6 | 0.45x10-6 | 2.4x10-6 | |||||||
| * | * | * | 1.75x10-6 | |||||||
| * | * | * | 2.4x10-6 | |||||||
| Pezo | KG | 4.5 | 8.5 | 12 | 32.5 | |||||
| Rotacio | Ŝafto Kuri | Kazo Kuri | Ŝafto Kuri | Kazo Kuri | Ŝafto Kuri | Kazo Kuri | Ŝafto Kuri | Kazo Kuri | ||
| Proporcio | 50 | 51 | 50 | 51 | 59 | 60 | 59 | 60 | ||
| 60 | 61 | 60 | 61 | 79 | 80 | 79 | 80 | |||
| 79 | 80 | 79 | 80 | 99 | 100 | 99 | 100 | |||
| 99 | 100 | 99 | 100 | 119 | 120 | 119 | 120 | |||
| * | * | * | * | * | * | 139 | 140 | |||
| Taksita senda torque | Nm kgf-m | 1400 (136) | 1615 (165) | 3595 (366) | 5100 (520) | |||||
| Akcelo kaj bremsita paro | Nm kgf-m | 2083 (212) | 4043 (412) | 7963 (812) | 11025 (1125) | |||||
| Instant Max.allowable-tordo | Nm kgf-m | 4155 (423.5) | 8075 (823) | 17975 (1830) | 25500 (2600) | |||||
| Taksita eniga rapido | Nr (rpm) | 2000 | 1500 | 1500 | 1500 | |||||
| Taksita vivdaŭro | Hr | 6000 | 6000 | 6000 | 6000 | |||||
| Permesebla maksona rapido | Nmax (rpm) | 2500 | 2500 | 2000 | 2000 | |||||
| Klinanta rigideco | Nm / arcmin kgf-m / arcmin | 1176 (120) | 2940 (300) | 4900 (500) | 7448 (760) | |||||
| Tordeca rigideco | Nm / arcmin kgf-m / arcmin | 196 (20) | 392 (40) | 980 (100) | 1176 (120) | |||||
| Max.lost-movado | (arcmin) | < 1.5 | < 1.5 | < 1.5 | < 1.5 | |||||
| Eraro de angula dissendo | ATE (arcsek) | 40 | 40 | 40 | 40 | |||||
| Reago | Norma kontraŭreago | (arcmin) | . 4.0 | . 4.0 | . 4.0 | . 4.0 | ||||
| Preciziga reago | . 2.0 | . 2.0 | . 2.0 | . 2.0 | ||||||
| Alta precizeca reago | < 1.0 | < 1.0 | < 1.0 | < 1.0 | ||||||
| Maksimuma tordiĝo | Nm kgf-m | 4312 (440) | 7840 (800) | 14112 (1440) | 17640 (1800) | |||||
| Taksita radia forto | Nm | 2156 | 3920 | 7056 | 8820 | |||||
| Maksimuma forto | N | 7840 | 14700 | 19600 | 24500 | |||||
| (Mi = GD2/ 4) Enigu inertecon Kg-m2 | 5.65x10-5 | 1.9x10-4 | 6x10-4 | 9x10-4 | ||||||
| 4.40x10-5 | 1.8x10-4 | 5.4x10-4 | 7.3x10-4 | |||||||
| 3.53x10-5 | 1.78x10-4 | 4x10-4 | 6x10-4 | |||||||
| 2.63x10-5 | 1.51x10-4 | 2.8x10-4 | 4.8x10-4 | |||||||
| * | * | * | 4.2x10-4 | |||||||
| Pezo | KG | 32.5 | 37 | 65 | 81 | |||||


Rilataj Produktoj
 RV-E Serio Roboto-Skatolo
RV-E Serio Roboto-Skatolo- FHD-C Serioj Roboto-Reduktilo
- Serio RV-M Roboto-Skatolo
- RV-C Serio Roboto-Skatolo
- SHD Series Harmonic Gearbox
- Motoro PC-NMRV
- CSG / CSF-Komponanto-Aro De Armona Redukto
- PARa Precizeco Rekta Angula Planeda Redaktilo
- Ĉefa Procezo-Strukturo & Patentita Teknologio de TQG-Planeda Redaktilo
- PAD-Alta Precizeco-Flanĝo-Eligo Planeda Redaktilo