Yleiskatsaus PO Ontto pyörivä reduktori
Yleiskatsaus PO Ontto pyörivä reduktori
 Yleiskatsaus PO Ontto pyörivä reduktori
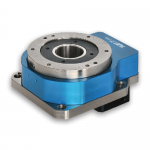
Yleiskatsaus PO Ontto pyörivä reduktori- Suora liitäntä yksinkertaistaa onton pyörivän toimilaitteen suunnittelua ja voi parantaa luotettavuutta.
- Suuri halkaisijainen ontto pyörivä käyttölaite tekee johdotuksesta ja putkistosta yksinkertaisen.
- Korkea tarkka sijainti. Kulmansiirron poikkeama on 4 min.
- Alkuperätunnistinsarjan käyttö on helppoa alkuperän regressiota varten.
- Inertiaalinen kuorman paikannus voidaan saavuttaa DG-ontolla pyörivällä pöydällä lyhyessä ajassa.
- Viestipulssin tulo ja sisäänrakennettu ohjaimen tyypin ohjain.
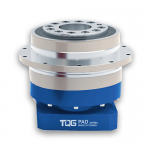
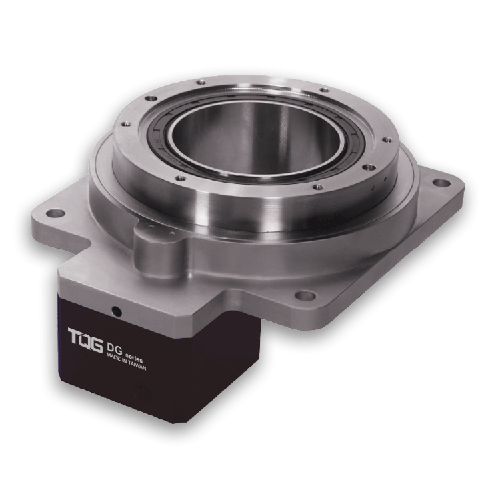
DG Hollow Rotary -toimilaitteen kuvaus
Pääosasto on eräänlainen sarjatuote, joka yhdistää korkean jäykkyyden onttoja pyöriviä toimilaitteita ja suljetun silmukan askelmoottoria. Siinä on helppo asentaa askelmoottori ja samalla suuret inerttipainot voidaan sijoittaa suurella tarkkuudella.
DG-sarjan ontto pyörivä toimilaite käyttää erittäin tarkkaa vaihteistoa ja säteittäisiä laakereita vääntömomentin ja jäykkyyden parantamiseksi, mikä tekee kuormasta vakaan. Sitä paitsi servomoottori tai askelmoottori voidaan mielivaltaisesti leikata vastaamaan niiden bittien määrää, joita nokkaindeksoija ei voi ohjata, ja paikannustarkkuus voi olla verrattavissa suoraan asemaan. Ontto pyörivä toimilaite voi toteuttaa inertiakuormituksen lyhyessä ajassa.
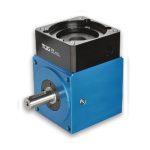
Työpöytä, koneen varsi tai muu kuorma voidaan asentaa suoraan onttoon pyörivään ulostulovaiheeseen. Siksi kiinnityskomponentit, kuten kytkin, voimansiirtokomponentit, kuten hihnapyörä ja huolto, eivät ole välttämättömiä.
Korkea tarkkuusasento ilman taaksepäin mahdollistaa suuren tarkkuuden asettamisen 2 ′ (0,033 asteen) joutokäynnillä.
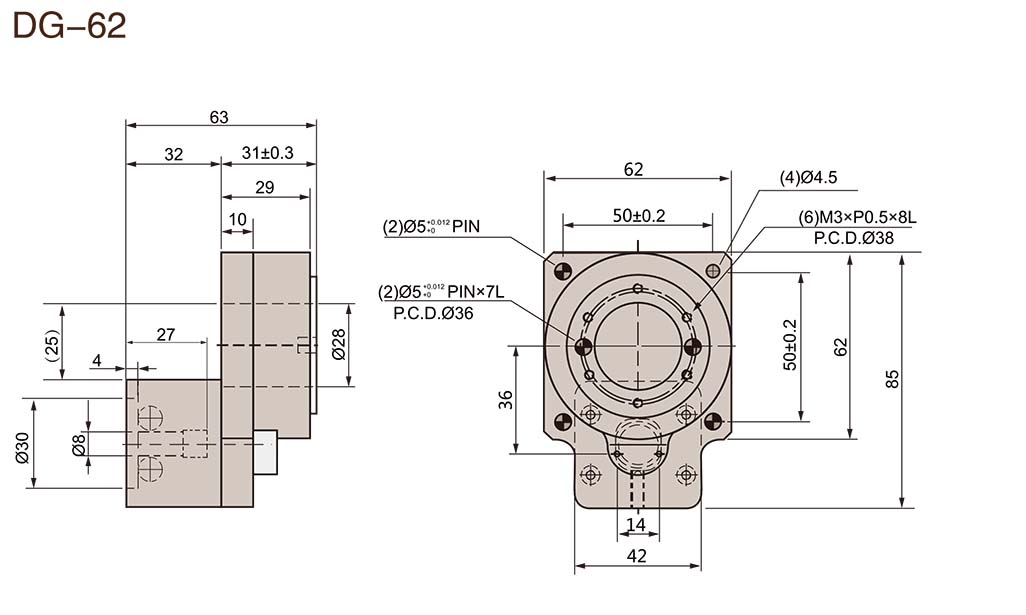
Ontto suuri halkaisijarakenteen ulostulovaiheessa on ontto rakenne, jonka halkaisija on 28 mm. Siksi laitteen suunnittelua voidaan yksinkertaistaa ja asennuspaikka voidaan tallentaa ylittämällä onttoja osia putkien ja johtojen kautta.
Nopea reagointi ja luotettavuus. DG-sarjan ontto pyörivän toimilaitteen käyttämä askelmoottori ei salli paikannusvirheitä, vaikka kuormitus muuttuisi yhtäkkiä. Pyörimisnopeutta ja äänenvoimakkuutta tarkkaillaan käytön aikana, ja vasteajan viive korjataan ja DG-toimilaitteen toiminta jatkuu suurimman käyttömomentin alueella, kun mahdollinen vaihehäviö havaitaan ylikuormituksen vuoksi.
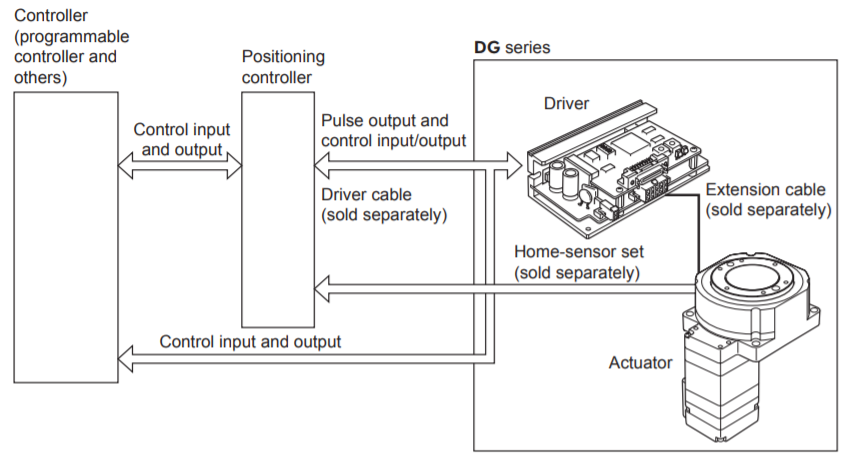
Pääosaston rakennusjärjestelmä Ontto pyörivä toimilaite
Huomautus: DG-sarjan onttojen pyörivien vähennysventtiilien toiminta vaatii säätimen, jolla on pulssin lähtötoiminto.
AS OVELLUSALAT Hollow Rotary Toimilaite
- CNC-indeksointilaite
- Robottivarsien nivelet
- Työstökoneiden neljäs prosessaxis
- Sotilastutka
- Automaattinen tuotantolinja
Yhteiset rakenteelliset muodot
- DirectType: CR
Moottorin akseli on samankeskinen kääntöpöydän keskiakselin kanssa, jota kutsutaan suoraan pyöriväksi alustaksi
- Sivutyyppi: SR
Moottorin akseli on yhdensuuntainen kääntöpöydän keskiakselin kanssa, jota kutsutaan sivulle asennetuksi pyöriväksi toimilaitteeksi.
- Paraksiaalityyppi: RR
Moottorin akseli ja kääntöpöydän keskiakseli ovat 90 asteen kulmassa, jota kutsutaan paraksiaaliseksi pyöriväksi pöydäksi.
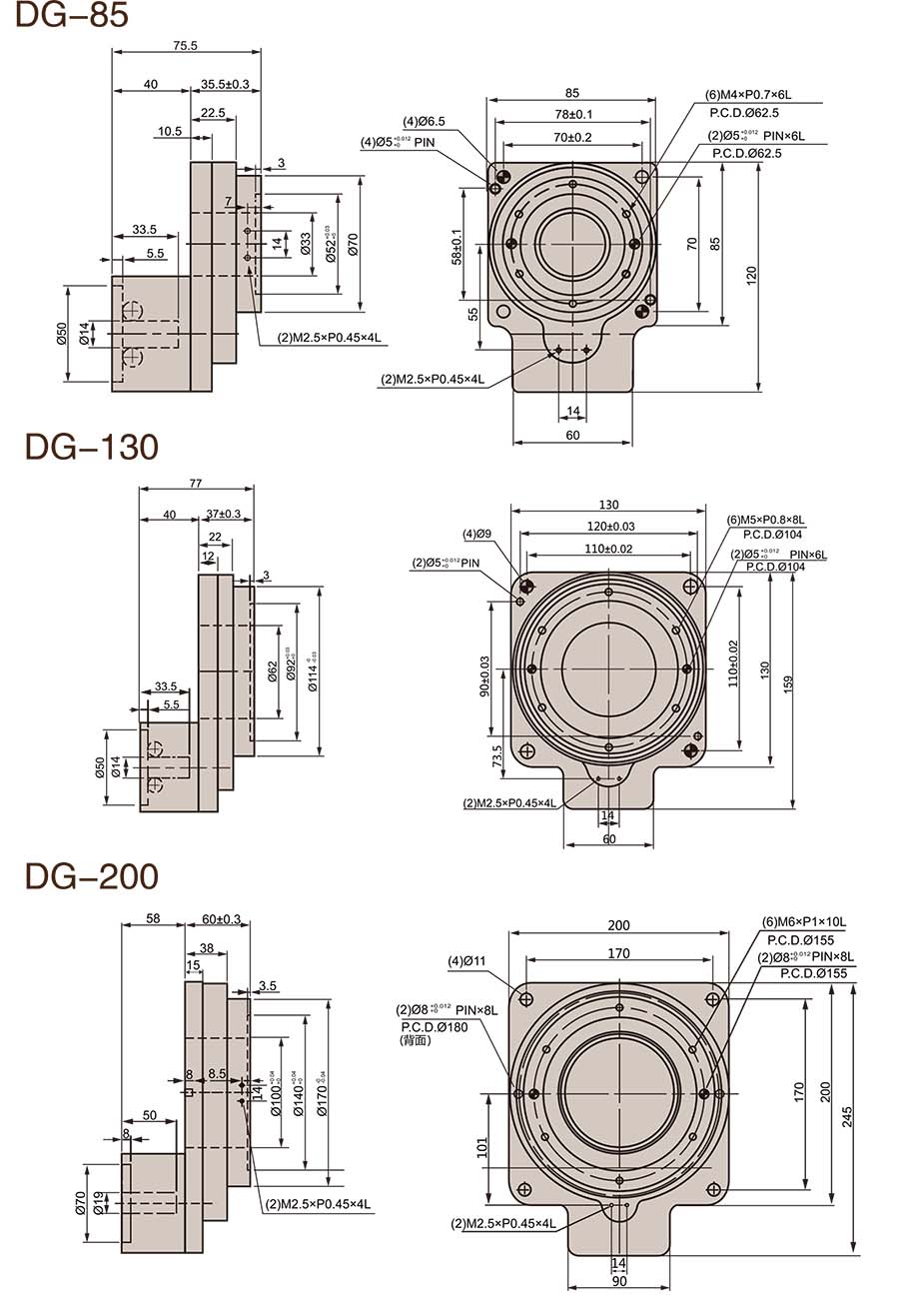
| määrittely | yksikkö | DG-62 | DG-85 | PO-130 | PO-200 |
| Sopiva servomoottori | W | 100W | 200-400W | 200-400W | 750-1000W |
| Myötävaikutusmomentti | nm | 3.5 | 20 | 20 | 65 |
| Pyörivä inertia | kgm2 | 2480*10-6 | 2498*10-6 | 9472*10-6 | 93581*10-6 |
| Sallittu nopeus | rpm | 200 | 200 | 200 | 200 |
| Suhde | 1/5 | 1/5 | 1/10 | 1/10 | |
| Sijainnin tarkkuus | sec | ≤15 | ≤15 | ≤15 | ≤15 |
| Toista sijainnin tarkkuus | sec | ± 10 | ± 5 | ± 5 | ± 5 |
| Sallitun työntövoiman kuormitus | kgf | 20 | 200 | 250 | 500 |
| Sallitut inertiakuormitus | nm | 10 | 60 | 60 | 200 |
| Pyörivä pöydän rinnakkaisuus | UM | ± 5 | ± 2 | ± 2 | ± 2 |
| Pyörivä taulukon koaksiaalisuus | mm | ± 0,01 | ± 0,01 | ± 0,01 | ± 0,01 |
| Paino | kg | 2.2 | 3 | 5.5 | 14 |
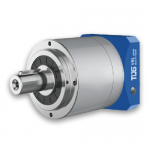
Liittyvät tuotteet
 ZK ontto pyörivä toimilaite
ZK ontto pyörivä toimilaite- PADR High Precision oikean kulman laipan ulostulo Planetary Gearbox
- PLF Ecomomy Laipan ulostulo Planetary Gearbox
- PAD High Precision laipan ulostulo Planetary Gearbox
- ZR Oikean kulman tarkkuus Planetary Gearbox
- VRSF-tarkkuus planetaarivaihteisto
- VRL High Precision Planetary Vaihteisto
- PT-2C-K kaksoiskokoinen akseli, ohjattu ohjauslaitteen tyyppi
- VRS High Torque High Precision Planetary Vaihteisto
- PLE Ecomomy Planetary Gearbox