Visión xeral de DG Redutor rotativo oco
Visión xeral de DG Redutor rotativo oco
 Visión xeral de DG Redutor rotativo oco
Visión xeral de DG Redutor rotativo oco- A conexión directa simplifica o deseño do actuador rotativo oco e pode mellorar a fiabilidade.
- A unidade rotativa oca de gran diámetro fai que a fiación e as tubaxes sexan simples.
- Alto posicionamento preciso. A desviación da transmisión de ángulos é de 4 min.
- Regressión de orixe fácil grazas ao uso do kit de sensor de orixe.
- Pódese conseguir un posicionamento de carga inercial a través dunha táboa rotativa oca de DG nun curto espazo de tempo.
- Entrada de pulso de comunicación e controlador de tipo de controlador incorporado.
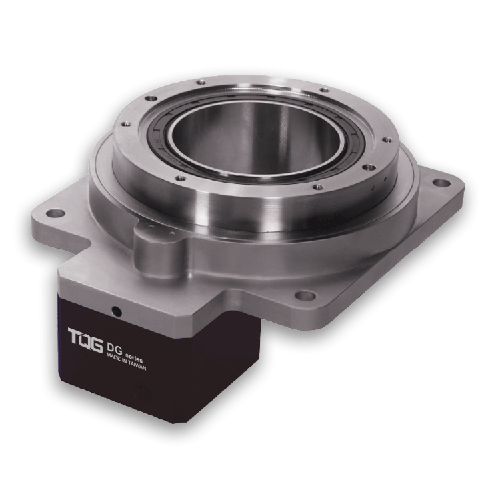
Descrición do actuador rotatorio DG Hollow
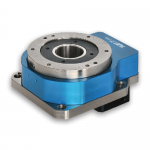
DG é un tipo de produto de serie que integra un actuador rotativo oco de alta rixidez e un motor paso a paso de circuíto pechado. Posúe un uso sinxelo do motor paso a paso e mentres tanto as grandes cargas de inercia poden colocarse cun alto grao de precisión.
O actuador rotativo oco da Serie DG utiliza unha estrutura de engrenaxes de alta precisión e rodamentos radiais para mellorar o par e a rixidez, o que fai que a carga sexa máis estable. Ademais, o servo motor ou o motor de paso pode ser cortado arbitrariamente para atender o número de bits que o indexador de leva non pode controlar e a precisión do posicionamento pode ser comparable á transmisión directa. O actuador rotativo oco pode realizar o posicionamento de carga inercial nun curto espazo de tempo.
A mesa de traballo, o brazo da máquina ou outra carga poden instalarse directamente na etapa de saída rotativa oca. Polo tanto, non son necesarios os compoñentes de fixación, como o acoplamento, os compoñentes de transmisión de potencia, como a polea e o mantemento.
O posicionamento de alta precisión sen reacción permite un posicionamento de alta precisión dentro dun movemento a ralentí de 2 '(0,033 graos).
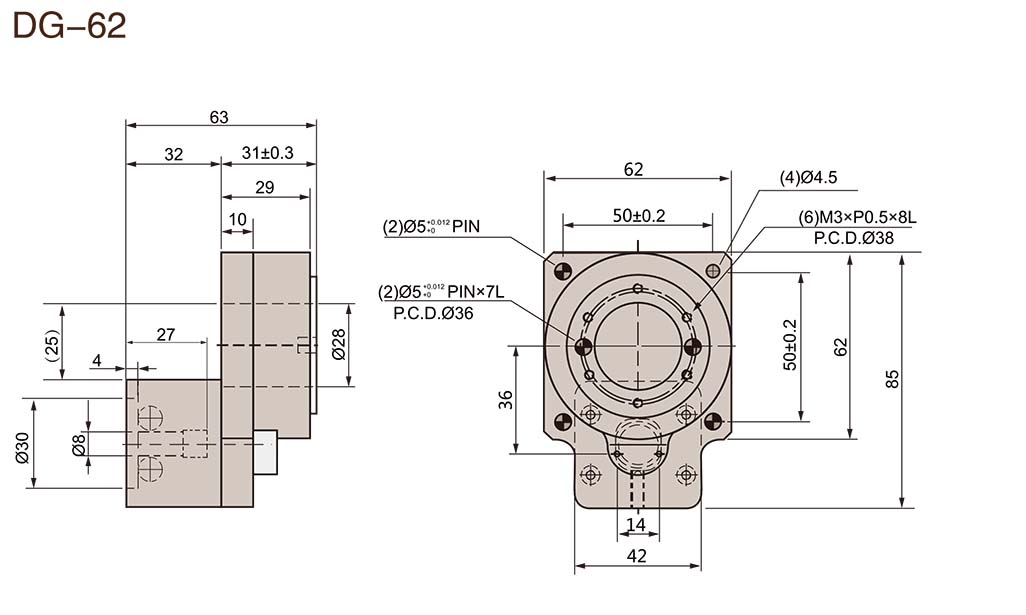
A etapa de saída de gran diámetro oco ten unha estrutura oca cun diámetro de 28 mm. Polo tanto, o deseño do dispositivo pódese simplificar e aforrar o espazo de instalación cruzando as pezas ocos a través de tubos e cables.
Resposta rápida e alta fiabilidade. O motor paso a paso utilizado polo actuador rotativo oco da serie DG non permite erros de posicionamento nin sequera cando a carga cambia de súpeto. A velocidade de rotación e o volume son controladas durante o funcionamento e corrixirase o tempo de resposta e continuará o funcionamento do actuador DG dentro do rango máximo de par de funcionamento cando se detecte a posibilidade de perder o paso como resultado da sobrecarga.
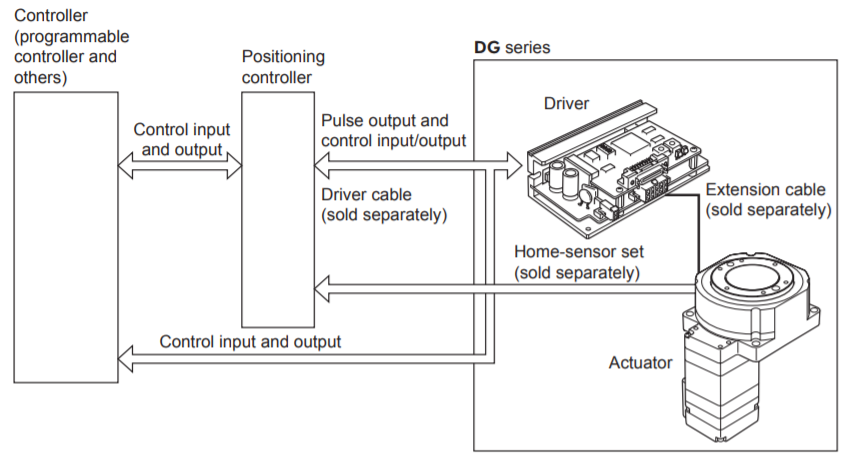
Sistema de construción da DG Actuador rotatorio oco
Nota: O funcionamento do redutor rotativo oco DG Series necesita o controlador con función de saída de pulso para funcionar.
Aaplicación de DG Hollow Rotartuator
- Dispositivo de indexación CNC
- Xuntas de brazo robóticas
- Máquina-ferramenta cuarta proceso
- Radar militar
- Liña de produción automática
Formas estruturais comúns
- DirectType: CR
O eixe do motor é concéntrico co eixe central do tocadiscos que se chama plataforma rotativa directa
- Tipo montado lateralmente: SR
O eixe do motor é paralelo ao eixe central do tocadiscos que se chama actuador rotativo montado lateralmente.
- Paraxialtype: RR
O eixe do motor eo eixe central do tocadiscos están nun ángulo de 90 graos e denomínase mesa giratoria de tipo paraxial.
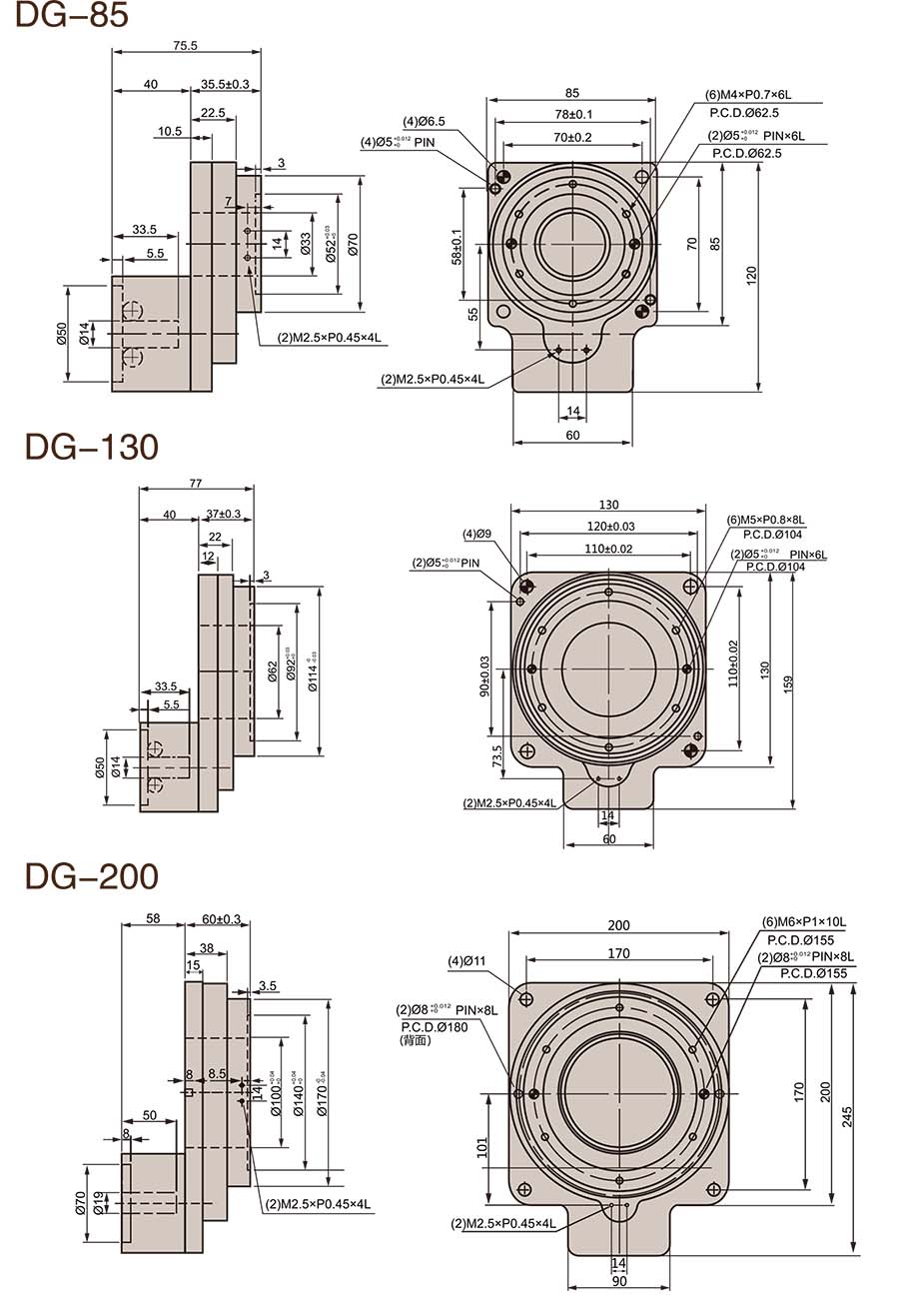
| Especificación | Unidade | DG-62 | DG-85 | DG-130 | DG-200 |
| Servomotor correspondente | W | 100W | 200-400W | 200-400W | 750-1000W |
| Par de subvención | Nm | 3.5 | 20 | 20 | 65 |
| Rotación da inercia | kgm2 | 2480*10-6 | 2498*10-6 | 9472*10-6 | 93581*10-6 |
| Velocidade permitida | rpm | 200 | 200 | 200 | 200 |
| Ratio | 1/5 | 1/5 | 1/10 | 1/10 | |
| Precisión de posición | seg | ≤15 | ≤15 | ≤15 | ≤15 |
| Repita a precisión da posición | seg | ± 10 | ± 5 | ± 5 | ± 5 |
| Carga de empuxe de bonificación | kgf | 20 | 200 | 250 | 500 |
| Carga de inercia de subsidio | Nm | 10 | 60 | 60 | 200 |
| Paralelismo de mesa rotativa | um | ± 5 | ± 2 | ± 2 | ± 2 |
| Coaxialidade de táboa rotativa | mm | ± 0,01 | ± 0,01 | ± 0,01 | ± 0,01 |
| Peso | kg | 2.2 | 3 | 5.5 | 14 |
Produtos relacionados
 Actuador rotativo ZK Hollow
Actuador rotativo ZK Hollow- Caixa de cambios planetaria de saída de ángulo recto de alta precisión PADR
- Caixa de velocidades planetaria de saída de flange de ecocomputación PLF
- Caixa de cambios planetaria de saída de brida de alta precisión PAD
- Caixa de cambios planetaria de precisión de ángulo recto ZR
- Caixa de cambios planetaria de precisión VRSF
- Caixa de cambios planetaria de alta precisión VRL
- PT-2C-K Tipo de caixón de dirección tipo chave de eixo dobre oco
- Caixa de cambios planetaria de alta precisión de alta velocidade de VRS
- PLE Ecomomy Planetary Gearbox