Overview of FHD-C Series Gearbox Robot
Overview of FHD-C Series Gearbox Robot
 Overview of FHD-C Series Gearbox Robot
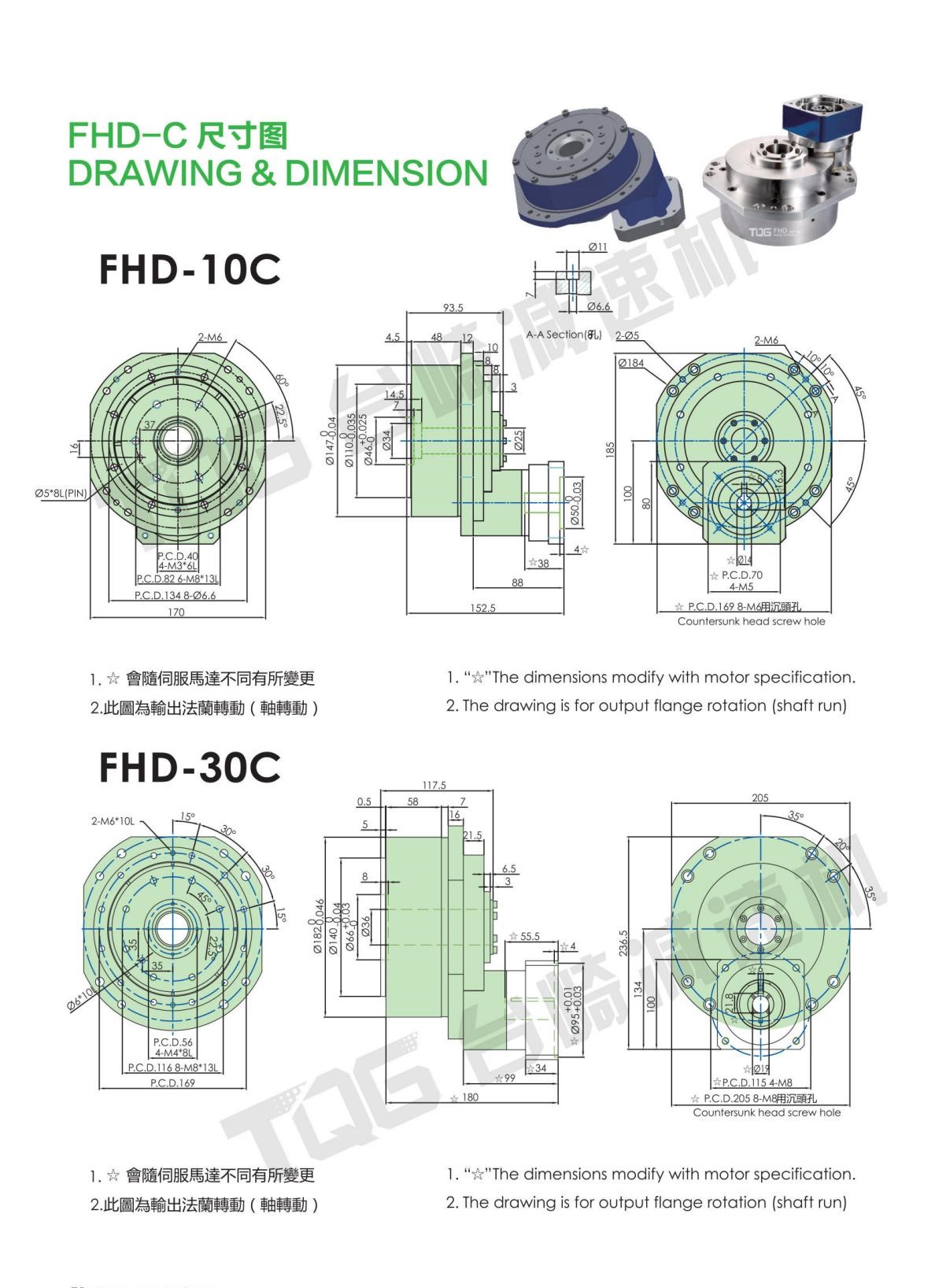
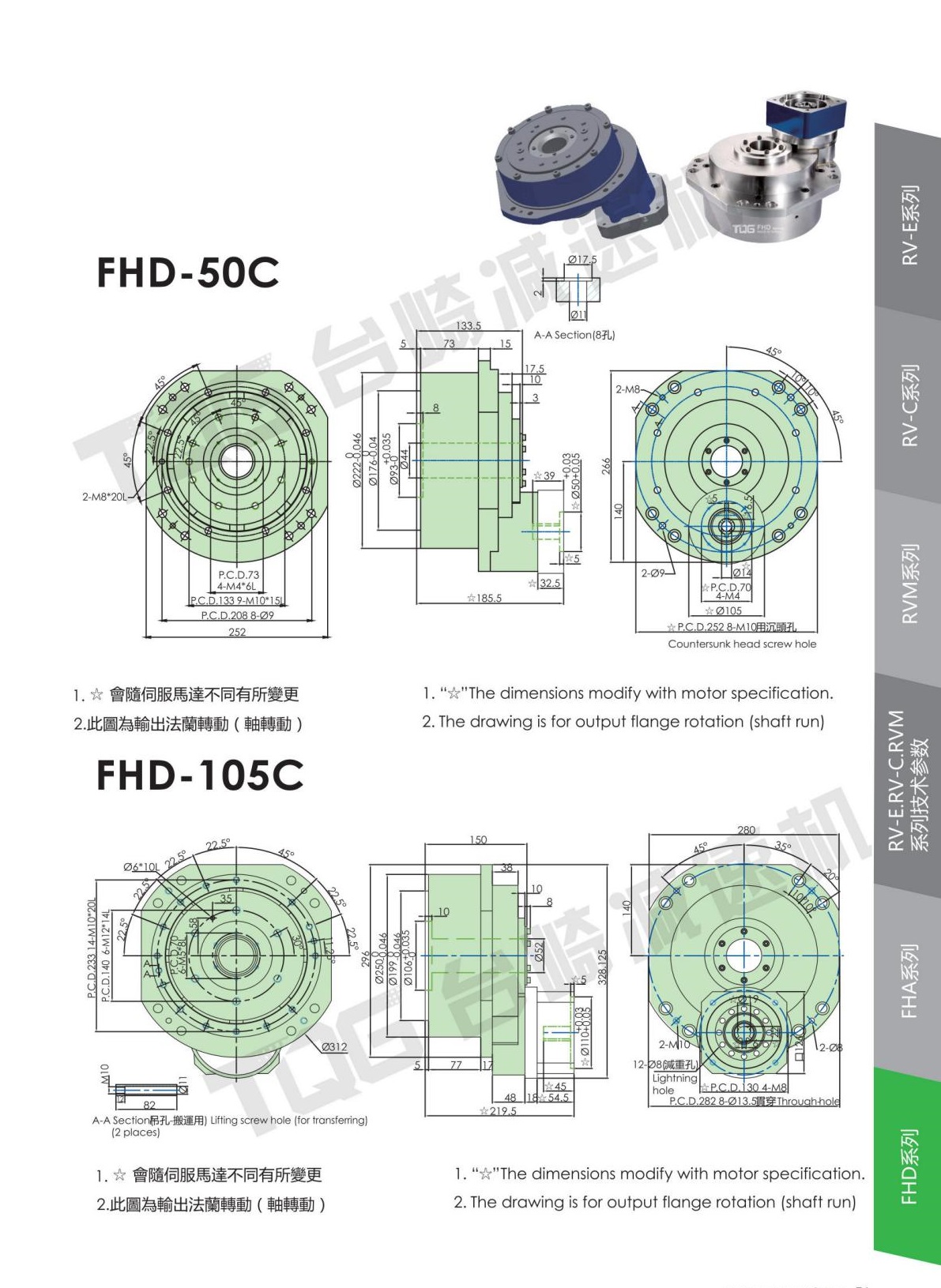
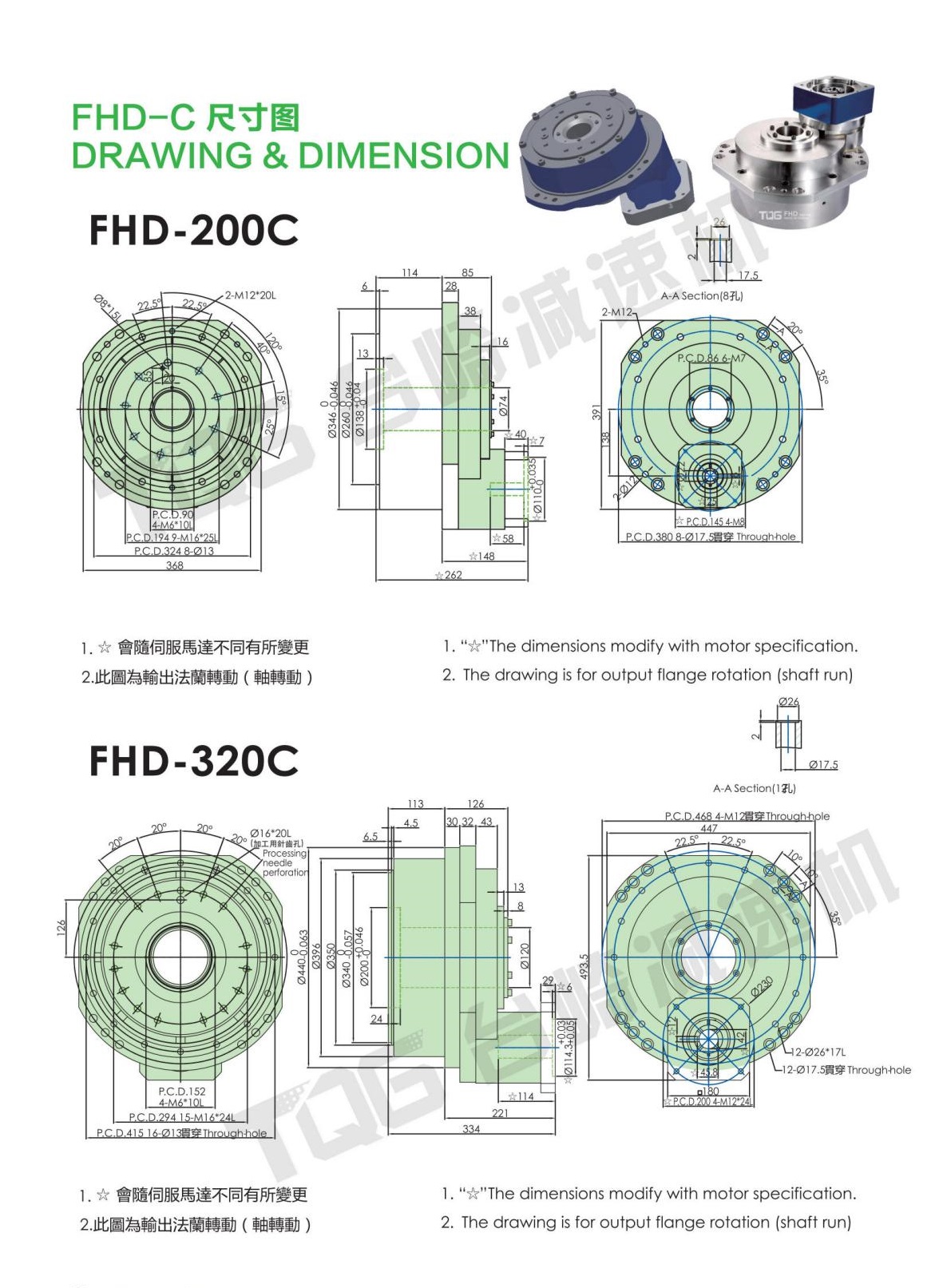
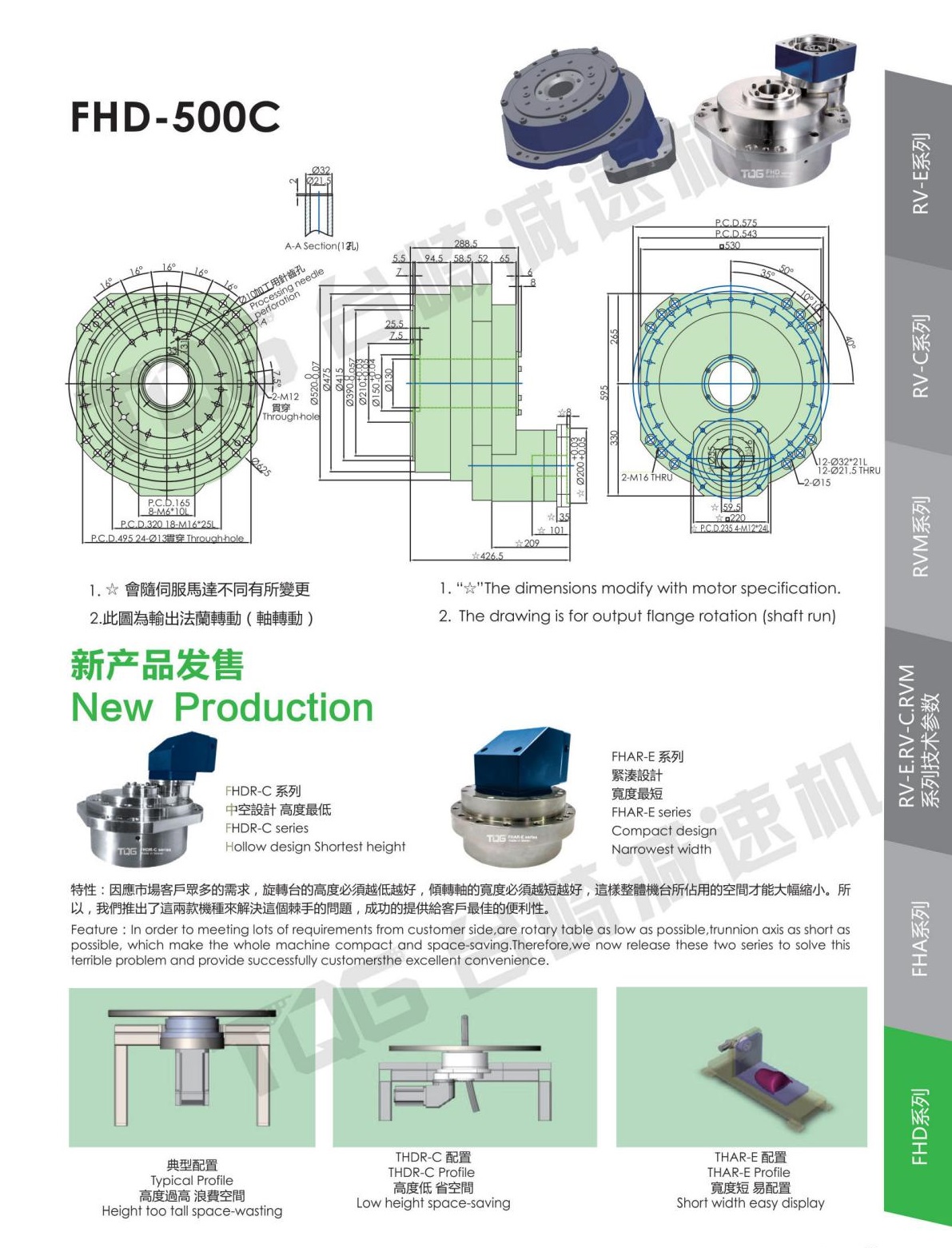
Overview of FHD-C Series Gearbox Robot- Type: FHD-10C~FHD-500C
- Backlash: ≤1-5 Arc.min
- Ratio: 1/64.38~1/219
- Capacity: 0.2kw~15kw
- Rotation Method: shaft run
- Rated output torque: 98Nm~4900Nm
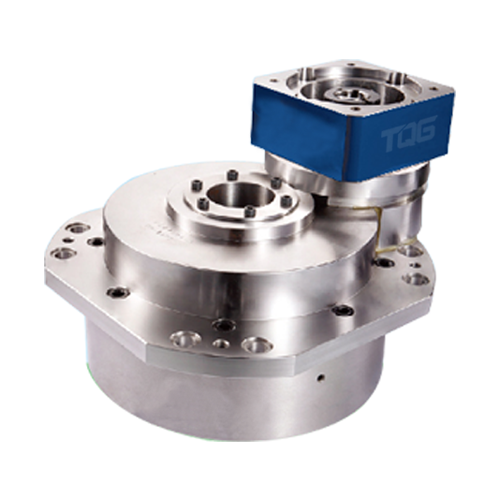
- Hollow body design & direct output. Designed specially for the base of robot.
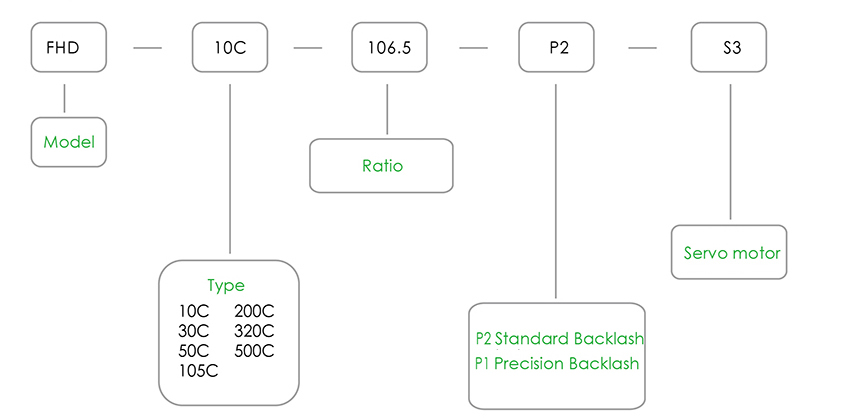
Indication of Model Numbers of FHD-C Series Robot Gearbox

ລາຍລະອຽດ of FHD-C Series Robot Gearbox Reducer
The TQG FHD-C series robot gearbox is designed of a hollow shaft and can be attached to servo motor directly to meet the various industial market requirement. The first axis of most of machines and robotic arms ask for hollow design, while the FHD-C speed reducer developed by TQG is the perfect solutions to the above. The features of TQG FHD-C servo gearbox show more convenient and application-friendly.
The TQG FHD-C RV reducer has introduced deburring machine, positioner, tool magazine, food machinery, chemical industry, pipe bending machine, spring/screw/nut industry, electronics industry, automation equipment, stamping robot, high-precision 4-axis and 6-axis machinery arm and its related 7 and 8 axis applications, sewage treatment equipment, which is the alternative to HD speed reducers (harmonis reducers), and HD gear boxes (harmonic gearboxes). And the lowest ratio is 64:1, the highest ratio can be up to 219:1.
The TQG FHD-C RV reducers are widely used in positioner, tool magazine, robot arm, machine tool, five-axis head, swing head, etc. (for reference only)
| Model | FHD-10C | FHD-30C | FHD-50C | FHD-105C | FHD-200C | FHD-320C | FHD-500C | ||
| Rotation | Shaft Run | Shaft Run | Shaft Run | Shaft Run | Shaft Run | Shaft Run | Shaft Run | ||
| Ratio | 106.5 | 64.38 | 78.4 | 97.6777 | 71.9924 | 94.5 | 111 | ||
| 154 | 84.18 | 102.4 | 110.5677 | 92.2932 | 109.5 | 147 | |||
| * | 103.98 | 126.4 | 136.3478 | 105.827 | 123 | 183 | |||
| * | * | * | 187.9079 | 138 | 153 | 219 | |||
| * | * | * | * | * | * | * | |||
| Rated output torque | Nm kgf-m | 98 (10) | 295 (30) | 490 (50) | 1030 (105) | 1960 (200) | 3136 (325) | 4900 (500) | |
| Acceleration&braking torque | Nm kgf-m | 245 (25) | 737 (75) | 1225 (125) | 2575 (262) | 4900 (500) | 7840 (800) | 12250 (1250) | |
| Instant Max.allowable torque | Nm kgf-m | 490 (50) | 1475 (150) | 2450 (250) | 5150 (525) | 9800 (1000) | 15680 (1600) | 24500 (2500) | |
| Rated input speed | Nr (rpm) | 2000 | 2000 | 1500 | 1500 | 1500 | 1500 | 1500 | |
| Rated output speed | Nr (rpm) | 15 | 15 | 15 | 15 | 15 | 15 | 15 | |
| Rated lifetime | Hr | 6000 | 6000 | 6000 | 6000 | 6000 | 6000 | 6000 | |
| Allowable Max.input speed (intermittent) | Nmax (rpm) | 28 | 47 | 38 | 26 | 28 | 21 | 18 | |
| 19 | 36 | 29 | 23 | 22 | 18 | 14 | |||
| * | 29 | 24 | 18 | 19 | 16 | 11 | |||
| * | * | * | 13 | 14 | 13 | 9 | |||
| Allowable Max.output speed (continuous) | Min (rpm) | 19 | 31 | 26 | 15 | 21 | 16 | 14 | |
| 13 | 24 | 20 | 14 | 16 | 14 | 10 | |||
| * | 19 | 16 | 11 | 14 | 12 | 8 | |||
| * | * | * | 8 | 11 | 10 | 7 | |||
| Tilting stiffness | Nm/arcmin kgf-m/arcmin | 421 (43) | 1068 (109) | 1960 (200) | 2813 (287) | 9800 (1000) | 12740 (1300) | 24500 (2500) | |
| Torsional stiffness | Nm/arcmin kgf-m/arcmin | 47 (4.8) | 147 (15) | 255 (26) | 510 (52) | 980 (100) | 1960 (200) | 3430 (350) | |
| Max.lost motion | (arcmin) | <2.0 | <2.0 | <1.0 | <1.0 | <1.0 | <1.0 | <1.0 | |
| Angle transmission error | ATE (arcsec) | 50 | 50 | 50 | 50 | 50 | 50 | 50 | |
| Backlash | Standard backlash | (arcmin) | <5.0 | <4.0 | <3.0 | <3.0 | <3.0 | <3.0 | <3.0 |
| Precision backlash | <3.0 | <2.0 | <1.0 | <1.0 | <1.0 | <1.0 | <1.0 | ||
| Max.tilting torque | Nm kgf-m | 1372 (140) | 1960 (200) | 3528 (360) | 4900 (500) | 17640 (1800) | 39200 (4000) | 78400 (8000) | |
| Rated radial force | Nm | 686 | 980 | 1764 | 2450 | 8820 | 20580 | 34300 | |
| Max.axial force | N | 5880 | 8820 | 11760 | 13720 | 19600 | 29400 | 39200 | |
| Start efficiency | % | 65 | 70 | 70 | 80 | 80 | 80 | 80 | |
| Weight | KG | 10.7 | 20 | 34 | 46 | 100 | 176 | * | |
ຜະລິດຕະພັນທີ່ກ່ຽວຂ້ອງ
 RV-C Series Robot Gearbox
RV-C Series Robot Gearbox- RV-E Series Robot Gearbox
- RV-M Series Robot Gearbox
- FHA-E Series Robot Gearbox
- AF-FH Hole Output Flange Input Speed Reducer
- VRSF Precision Planetary Gearbox
- CSG / CSF Component Set of Harmonic Gearbox
- CNC Machine Tool Equipment
- TQG Precision Planetary Gearboxes ໄດ້ຖືກນໍາໃຊ້ໃນ Automation Industrial Robotic
- AAW-A (B) S-RF Large Hollow Rotary Flange ປະເພດ Precision 90 Degree Bevel Gearbox