Overview daripada Reduced Robot FHA-E Series
Overview daripada Reduced Robot FHA-E Series
 Overview daripada Reduced Robot FHA-E Series
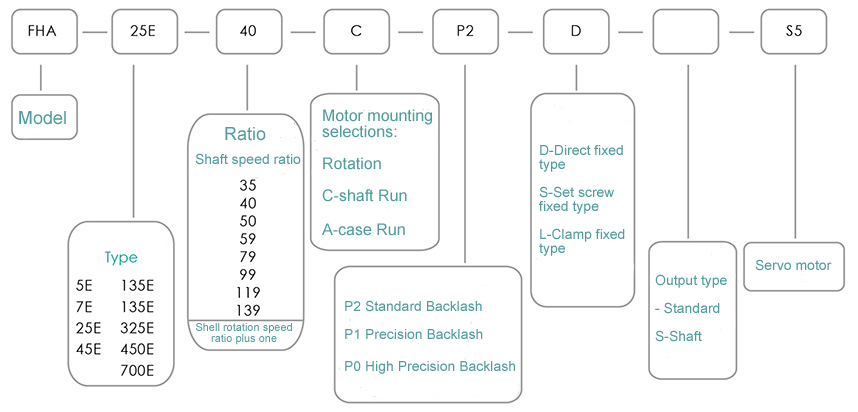
Overview daripada Reduced Robot FHA-E Series- Jenis: FHA-5E ~ FHA-450E
- Backlash: ≤1-5 Arc.min
- Nisbah: 1/35 ~ 1/140
- Kapasiti: 0.1kw ~ 15kw
- Putaran: Aci berjalan atau kes matahari
- Rated tork output: 60Nm ~ 5100Nm
- Output langsung, keterlibatan ketat dan ketepatan tinggi
Petunjuk Reduced Robot FHA-E Series
Penerangan daripada Reduced Robot FHA-E Series
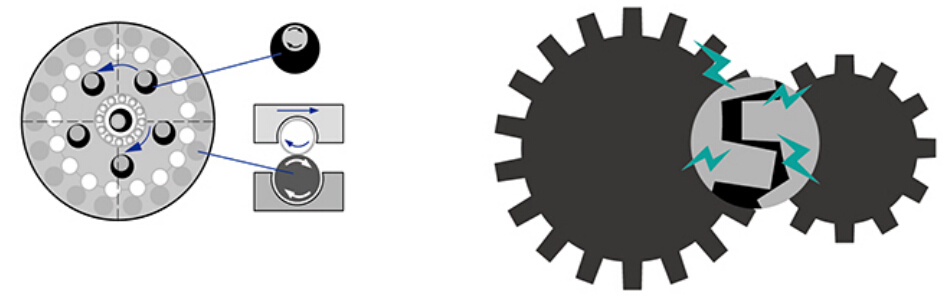
■ Kapasiti beban impak Kotak gear FHA-E dipertingkatkan dengan mengguna pakai teknologi pengedaran load-disentralisasi pelbagai peralatan. Walaupun roda gigi tradisional atau gear heliks mesti menahan kesan yang berlebihan disebabkan oleh pertalian meshing hanya satu gigi.

■ Kecekapan yang sangat tinggi diperoleh terima kasih kepada pemacu penggelek dalaman & luaran yang terlibat gelongsor dan putaran sendiri. Sedangkan dalam mekanisme tradisional, penolakan torsi yang tidak menentu disebabkan oleh lelasan atau gangguan gigi.
■ Penghantaran kreatif, kelebihan yang luar biasa
FHA-E Series Reducer Robot menyediakan semua kelebihan kotak gear harmonik negatif kekurangan flexspline.
Tanpa meningkatkan tahap reducer, kotak gear robot FHA-E dapat memberikan rasio yang tinggi disebabkan oleh pemacu gear planet. Dan pemacu cycloid menyediakan kapasiti muatan tinggi tanpa getaran jelas.
■ Kecekapan tinggi dengan kehilangan gelongsor yang rendah
Semua elemen gelongsor terdiri daripada roller. Apabila roller rolling, gelongsor juga terlibat, dan oleh itu mekanisme kehilangan hampir tidak diendahkan dan mendapat kecekapan tinggi yang lebih tinggi sehingga 95% di bawah hanya satu tahap pengurangan.
■ Operasi lancar dengan bunyi rendah
Reducer Robot Series FHA-E menyediakan penglibatan meshing berbilang gigi, pada masa yang sama, mengimbangi pembinaan cakera berkembar mengimbangi getaran, pekali tumpang tindih tinggi, dan hubungan roller dengan jurang yang sesuai untuk mengelakkan gangguan seperti gear, yang dapat mengurangkan bunyi bising dan getaran dengan berkesan.
■ Ketepatan tinggi dengan tindak balas rendah
Hampir sifar teguran pengurangan robot FHA-E berkat penglibatan meshing multi-gigi, dan oleh itu penyimpangan penghantaran hanya 25% daripada pengurangan gear tradisional.
■ Pengeluaran tork yang tinggi disebabkan diameter pemancar gelombang yang panjang
Tayar yang lebih tinggi daripada pengurangan robot FHA-E disebabkan oleh diameter gelombang roller yang lebih besar daripada penghantaran roller daripada cakera tradisional kerana ciri tetap gelombang gelongsor.
■ Struktur padat dengan nisbah tinggi
Tahap tunggal FHA-E gear robot boleh mencapai nisbah tinggi kerana kuantiti penggelek pada cakera roller sama dengan nisbah. Aci output dan aci input pengurang robot FHA-E adalah dalam barisan, struktur yang diperkuat dan menjimatkan ruang, oleh itu dimensi lebih kompak di bawah nisbah pengurangan yang sama pengurang gear dan reducer cacing.
■ Penglibatan pelbagai gigi menyumbang kepada keupayaan memuat tinggi
Berbanding dengan salah satu gigi gigi reducer gear cacing atau gear reducer, kotak gear robot FHT-A dipaparkan dengan 50% roller meshing engagement secara serentak mekanisme roller cakera berkembar, oleh itu kapasiti beban lebih tinggi dari pengurangan gear tradisional.
■ Roller gigi menyumbang kepada hayat perkhidmatan yang panjang
Mekanisme keseluruhan yang teguh, bebas penyelenggaraan dan hayat perkhidmatan yang panjang disebabkan oleh pemacu roller kreatif, teknologi dan proses yang luar biasa, garis besar roller khas tanpa gigi patah.
■ Manfaat ekonomi yang lebih baik kerana penggunaan tenaga yang rendah
Ciri pengurangan robot FHA-E mempunyai keluaran tork yang tinggi, kecekapan tinggi, beban operasi yang rendah, penggunaan tenaga yang rendah dan faedah ekonomi yang lebih tinggi.
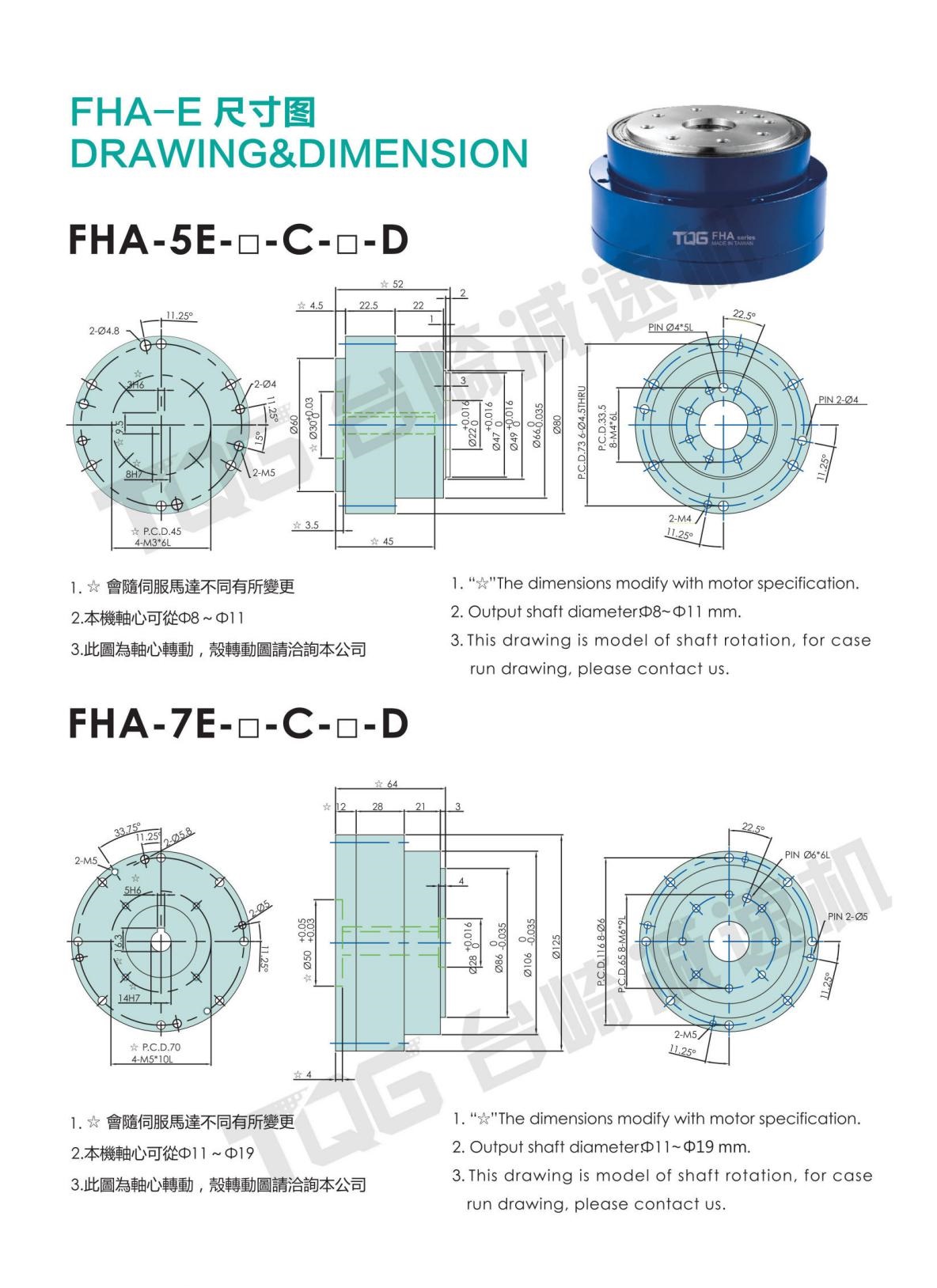
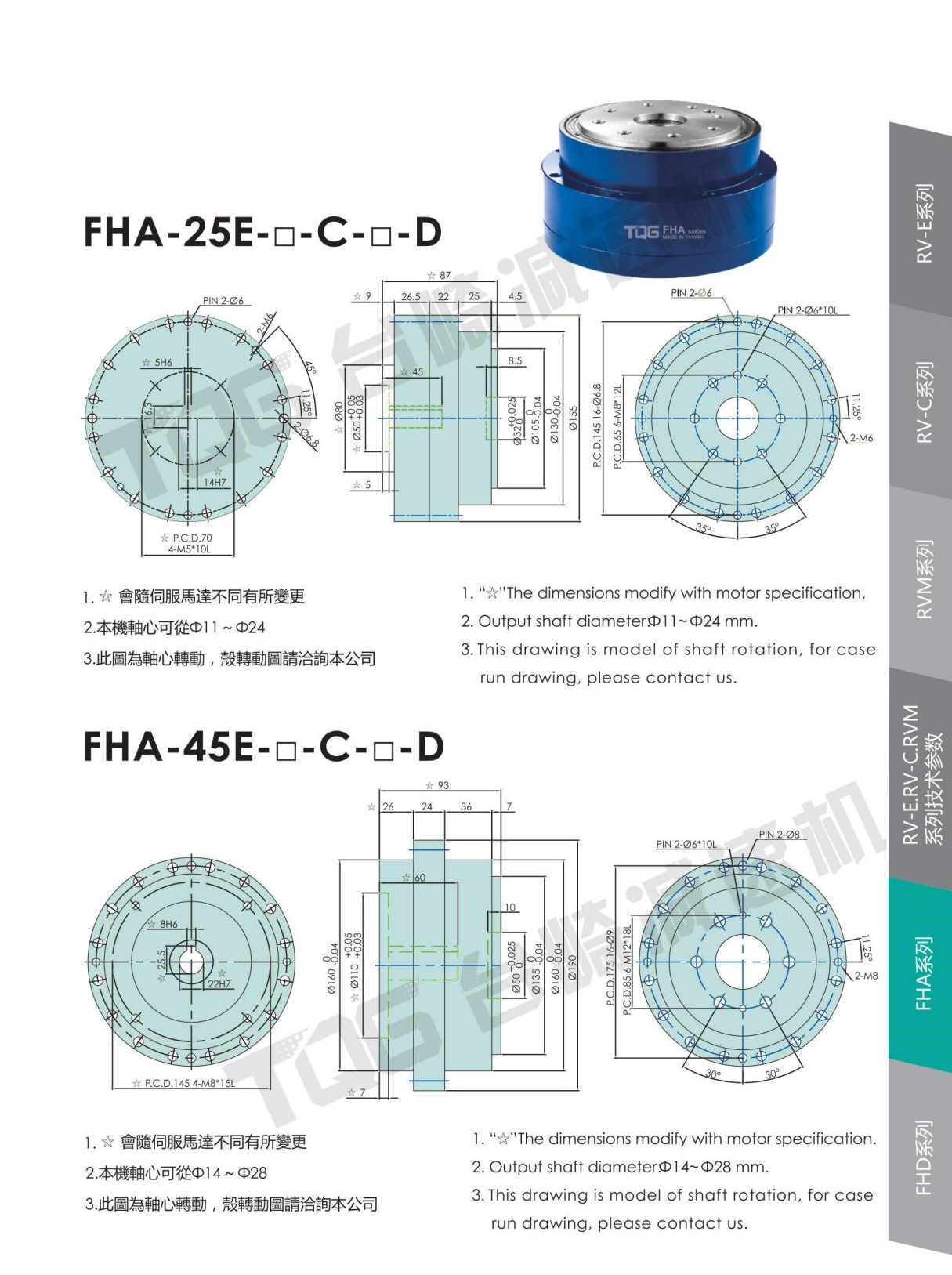
Reka bentuk Hollow untuk keluaran langsung
Reducer FHA-E RV direka mesra dengan poros berongga dan membolehkan susunan tiub hidraulik dan kabel elektrik melalui pengurangan FHA-E. Dan mudah untuk memasang motor melalui gandingan dan bebibir motor.
| Model | FHA-5E | FHE-7E | FHA-25E | FHA-45E | ||||||
| Putaran | Aci Jalankan | Kes Jalankan | Aci Jalankan | Kes Jalankan | Aci Jalankan | Kes Jalankan | Aci Jalankan | Kes Jalankan | ||
| Nisbah | 40 | 41 | 40 | 41 | 40 | 41 | 35 | 36 | ||
| 50 | 51 | 50 | 51 | 50 | 51 | 40 | 41 | |||
| * | * | 59 | 60 | 60 | 61 | 50 | 51 | |||
| * | * | * | * | * | * | 59 | 60 | |||
| * | * | * | * | * | * | 79 | 80 | |||
| Nilai tork ouput | Nm kgf-m | 60 (6.1) | 83 (8.46) | 245 (25) | 460 (46.8) | |||||
| Tork pecutan & tork | Nm kgf-m | 97.5 (9.9) | 136 (14) | 515 (52) | 1158 (118) | |||||
| Tork Max.allowable instan | Nm kgf-m | 245 (25) | 415 (42) | 1000 (102) | 2300 (234.4) | |||||
| Kelajuan input yang dinilai | Nr (rpm) | 2000 | 2000 | 2000 | 2000 | |||||
| Umur hayat yang dinilai | Hr | 6000 | 6000 | 6000 | 6000 | |||||
| Kelajuan Max.input yang dibenarkan | Nmax (rpm) | 3000 | 3000 | 3000 | 2500 | |||||
| Mengetatkan kekakuan | Nm / arcmin kgf-m / arcmin | 82 (8.3) | 117 (12) | 372 (38) | 931 (95) | |||||
| Kekakuan torsi | Nm / arcmin kgf-m / arcmin | 18 (1.83) | 20 (2) | 49 (5) | 108 (11) | |||||
| Pergerakan Max.lost | (arcmin) | <3.0 | <3.0 | <3.0 | <3.0 | |||||
| Kesalahan penghantaran sudut | ATE (arcsec) | 40 | 80 | 40 | 40 | |||||
| Backlash | Tindak balas standard | (arcmin) | <5.0 | <5.0 | <5.0 | <5.0 | ||||
| Tindak balas ketepatan | <3.0 | <3.0 | <3.0 | <3.0 | ||||||
| Tindak balas ketepatan yang tinggi | * | * | * | <1.0 | ||||||
| Tork maks.tilting | Nm kgf-m | 282 (28.8) | 392 (40) | 1764 (180) | 3332 (340) | |||||
| Daya radial yang dinilai | Nm | 118 | 196 | 882 | 1666 | |||||
| Daya Max.axial | N | 885 | 1470 | 3920 | 5194 | |||||
| (I = GD2/ 4) Input inersia Kg-m2 | 1.65x10-6 | 2.60x10-6 | 1.08x10-6 | 4.50x10-6 | ||||||
| 1.46x10-6 | 1.85x10-6 | 0.65x10-6 | 3.75x10-6 | |||||||
| * | 1.66x10-6 | 0.45x10-6 | 2.4x10-6 | |||||||
| * | * | * | 1.75x10-6 | |||||||
| * | * | * | 2.4x10-6 | |||||||
| Berat badan | KG | 4.5 | 8.5 | 12 | 32.5 | |||||
| Putaran | Aci Jalankan | Kes Jalankan | Aci Jalankan | Kes Jalankan | Aci Jalankan | Kes Jalankan | Aci Jalankan | Kes Jalankan | ||
| Nisbah | 50 | 51 | 50 | 51 | 59 | 60 | 59 | 60 | ||
| 60 | 61 | 60 | 61 | 79 | 80 | 79 | 80 | |||
| 79 | 80 | 79 | 80 | 99 | 100 | 99 | 100 | |||
| 99 | 100 | 99 | 100 | 119 | 120 | 119 | 120 | |||
| * | * | * | * | * | * | 139 | 140 | |||
| Nilai tork ouput | Nm kgf-m | 1400 (136) | 1615 (165) | 3595 (366) | 5100 (520) | |||||
| Tork pecutan & tork | Nm kgf-m | 2083 (212) | 4043 (412) | 7963 (812) | 11025 (1125) | |||||
| Tork Max.allowable instan | Nm kgf-m | 4155 (423.5) | 8075 (823) | 17975 (1830) | 25500 (2600) | |||||
| Kelajuan input yang dinilai | Nr (rpm) | 2000 | 1500 | 1500 | 1500 | |||||
| Umur hayat yang dinilai | Hr | 6000 | 6000 | 6000 | 6000 | |||||
| Kelajuan Max.input yang dibenarkan | Nmax (rpm) | 2500 | 2500 | 2000 | 2000 | |||||
| Mengetatkan kekakuan | Nm / arcmin kgf-m / arcmin | 1176 (120) | 2940 (300) | 4900 (500) | 7448 (760) | |||||
| Kekakuan torsi | Nm / arcmin kgf-m / arcmin | 196 (20) | 392 (40) | 980 (100) | 1176 (120) | |||||
| Pergerakan Max.lost | (arcmin) | <1.5 | <1.5 | <1.5 | <1.5 | |||||
| Kesalahan penghantaran sudut | ATE (arcsec) | 40 | 40 | 40 | 40 | |||||
| Backlash | Tindak balas standard | (arcmin) | <4.0 | <4.0 | <4.0 | <4.0 | ||||
| Tindak balas ketepatan | <2.0 | <2.0 | <2.0 | <2.0 | ||||||
| Tindak balas ketepatan yang tinggi | <1.0 | <1.0 | <1.0 | <1.0 | ||||||
| Tork maks.tilting | Nm kgf-m | 4312 (440) | 7840 (800) | 14112 (1440) | 17640 (1800) | |||||
| Daya radial yang dinilai | Nm | 2156 | 3920 | 7056 | 8820 | |||||
| Daya Max.axial | N | 7840 | 14700 | 19600 | 24500 | |||||
| (I = GD2/ 4) Input inersia Kg-m2 | 5.65x10-5 | 1.9x10-4 | 6x10-4 | 9x10-4 | ||||||
| 4.40x10-5 | 1.8x10-4 | 5.4x10-4 | 7.3x10-4 | |||||||
| 3.53x10-5 | 1.78x10-4 | 4x10-4 | 6x10-4 | |||||||
| 2.63x10-5 | 1.51x10-4 | 2.8x10-4 | 4.8x10-4 | |||||||
| * | * | * | 4.2x10-4 | |||||||
| Berat badan | KG | 32.5 | 37 | 65 | 81 | |||||


Produk Berkaitan
 RV-E Series Robot Gearbox
RV-E Series Robot Gearbox- Robot Gear Box FHD-C Series
- RV-M Series Robot Gearbox
- RV-C Series Robot Gearbox
- SHD Series Harmonic Gearbox
- PC-NMRV Gear Motor
- Set CSG / CSF Set Kotak Harmonik
- PAR Precision Right Angle Planetary Gearbox
- Struktur Proses Utama & Teknologi Dipatenkan dari Gearbox Planetary TQG
- PAD Gear Peti Isipadu Output Precision Tinggi