Visão geral de Caixa de engrenagens planetária AATM-RF
Visão geral de Caixa de engrenagens planetária AATM-RF
 Visão geral de Caixa de engrenagens planetária AATM-RF
Visão geral de Caixa de engrenagens planetária AATM-RF- Eixo oco grande com saída de flange rotativa
- AATM-RF adota a engrenagem cónica espiral de alta precisão, que foi feita de aço de liga de níquel-cromo (SCM415 HRC60) para perceber a alta resistência.
- Com a estrutura rígida de sua caixa de engrenagens, suportada por rolamentos cônicos duplos, a caixa de engrenagens planetária AATM-RF pode realizar a alta rigidez.
- AATM-RF pode realizar alta eficiência devido à combinação de mecanismo planetário de alta eficiência e mecanismo de guarda-chuva espiral de precisão.
Indicação dos números do modelo da caixa de direção da AATM-RF
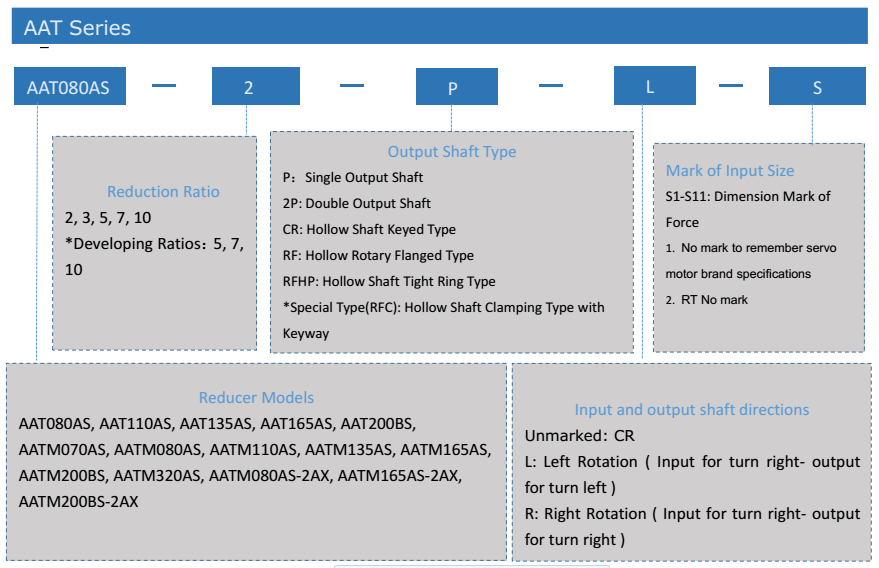
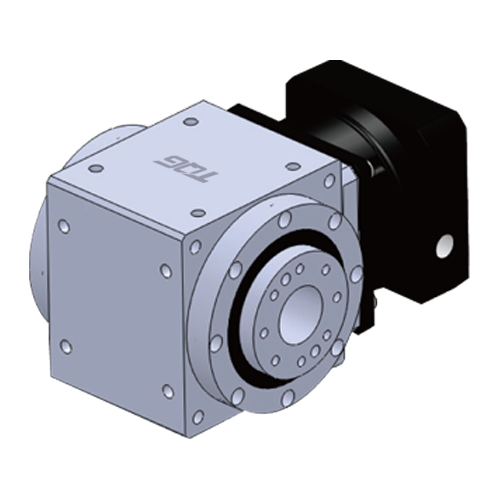
Descrição do Caixa de engrenagens de saída de eixo oco AATM-RF
O TQG AATM-RF é uma caixa de engrenagens planetárias de alta precisão tipo flange rotativo com baixa folga e alta precisão de transmissão. Esta caixa de engrenagens servo série pode fornecer alta rigidez de torção e alta capacidade de carga axial e alta com a estrutura compacta e suporte de rolamento de rolos cônicos. A série AATM-RF possui várias dimensões e proporções de 1: 2 a 1:10. Além disso, a série AATM-RF apresenta menor inércia, menor tamanho e peso, operação mais silenciosa, maior eficiência e maior versatilidade de montagem.
Mais recursos da caixa de engrenagens AATM-RF Right Angle
- AATM-RF pode economizar espaço com um tamanho pequeno.
- Binário de saída elevado: 15NM ~ 1600NM, módulo espiral de engrenagem cónica M1.0 ~ M6.0
- Adotando o modo de transmissão do eixo oco, o AATM-RF é conveniente de instalar e a precisão da transmissão é maior.
- Capacidade aplicável: 50W ~ 15KW
Aplicação do redutor da engrenagem do ângulo direito de AATM-RF
AATM-RF 90 graus gearbox são apresentados com grande flange oco rotativo, e amplamente utilizado para ocasiões de grande carga, TFT-LCD flip painel, mecanismo de rotação, rotação da base do braço mecânico, rotação do braço oscilante, rotação de indexação, etc

produtos relacionados
 Tipo giratório oco grande da flange de AAW-A (b) S-RF de caixa de engrenagens chanfrada da precisão 90 graus
Tipo giratório oco grande da flange de AAW-A (b) S-RF de caixa de engrenagens chanfrada da precisão 90 graus- Caixa de engrenagens cônica de eixo de saída dupla AT-L
- AATM-2P Tipo de eixo de saída dupla da caixa de direção
- Redutor de velocidade da entrada da flange da saída do furo de AF-FH
- Caixa de engrenagens cónica de entrada de eixo oco AT-FC
- Redutor de velocidade com chaveta PAW-CR
- AAW-A (B) S-RFK Flange com chave tipo de caixa de engrenagens de ângulo reto
- AAW-A (B) SP Caixa de Velocidades de Ângulo Reto de Precisão de Precisão Única
- PT-2C-K eixo oco duplo com chave tipo de caixa de engrenagens de direção
- Tipo apertado grande do anel do eixo oco de AAW-A (B) S-RFHP de caixa de engrenagens de um grau de 90 graus