Overvvista de Redutor de Robô Série FHA-E
Overvvista de Redutor de Robô Série FHA-E
 Overvvista de Redutor de Robô Série FHA-E
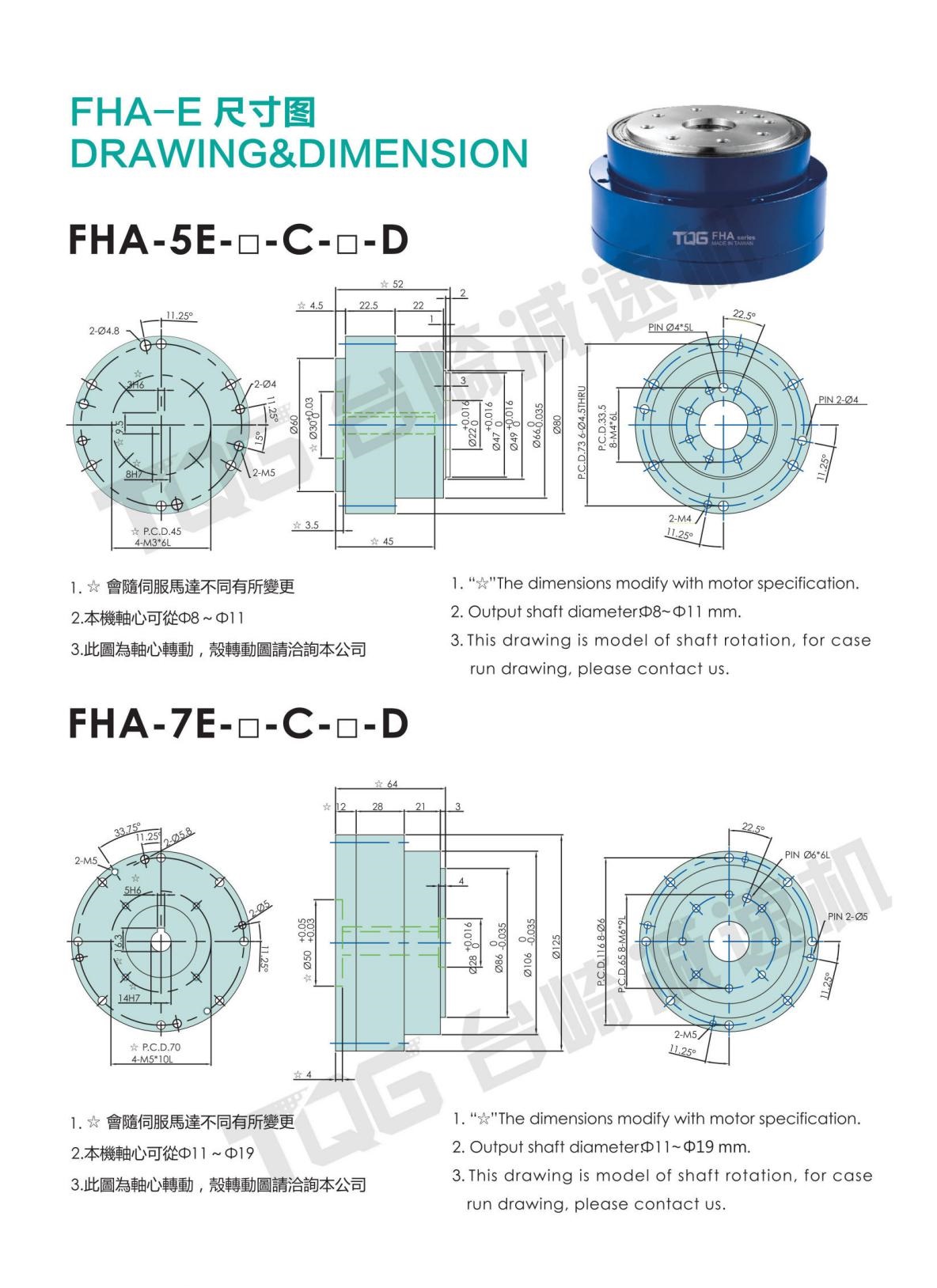
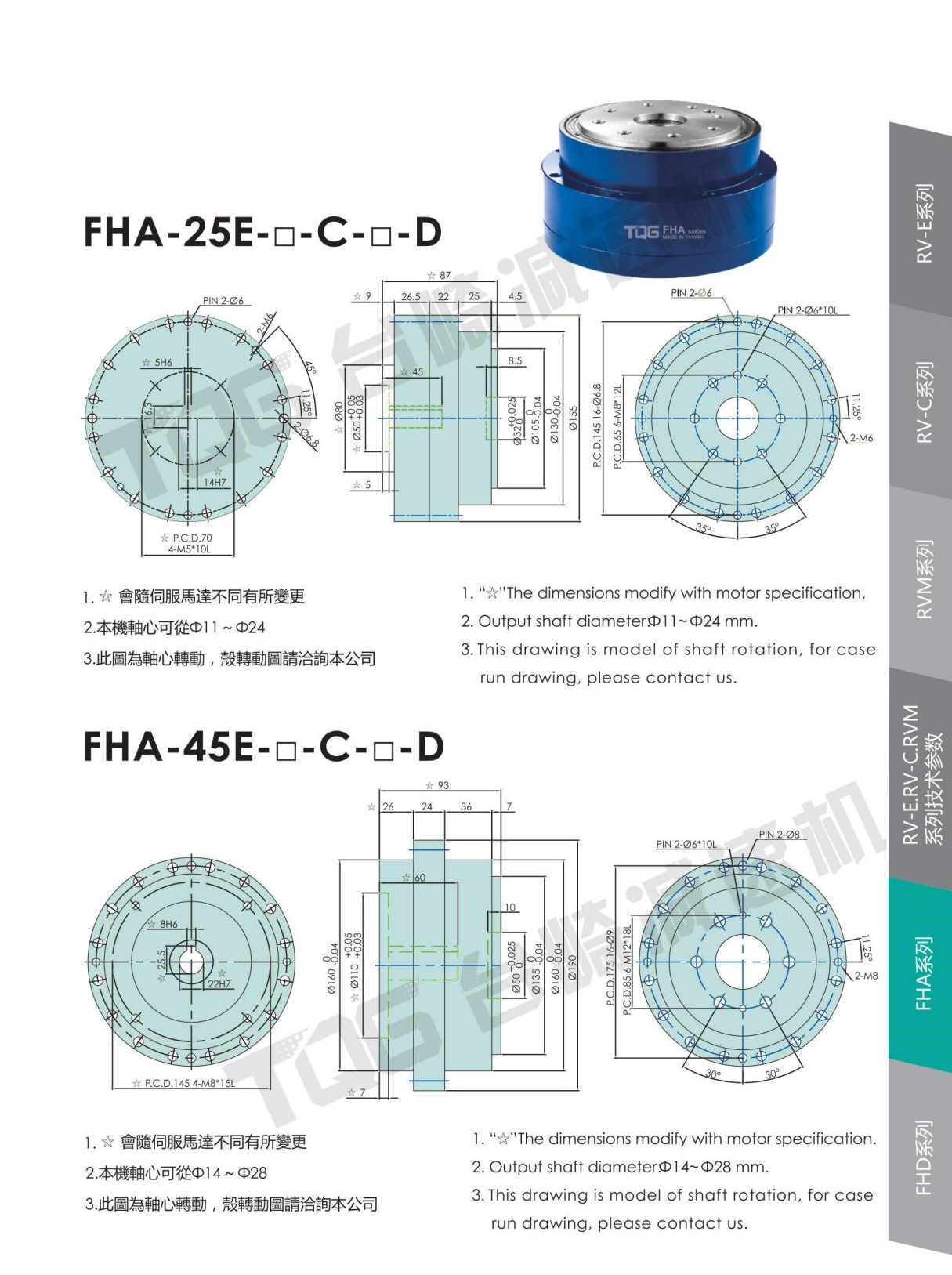
Overvvista de Redutor de Robô Série FHA-E- Tipo: FHA-5E ~ FHA-450E
- Folga: ≤1-5 Arc.min
- Relação: 1/35 ~ 1/140
- Capacidade: 0.1kw ~ 15kw
- Rotação: Corrida do eixo ou caso sol
- Torque nominal de saída: 60Nm ~ 5100Nm
- Saída direta, engate apertado e alta precisão
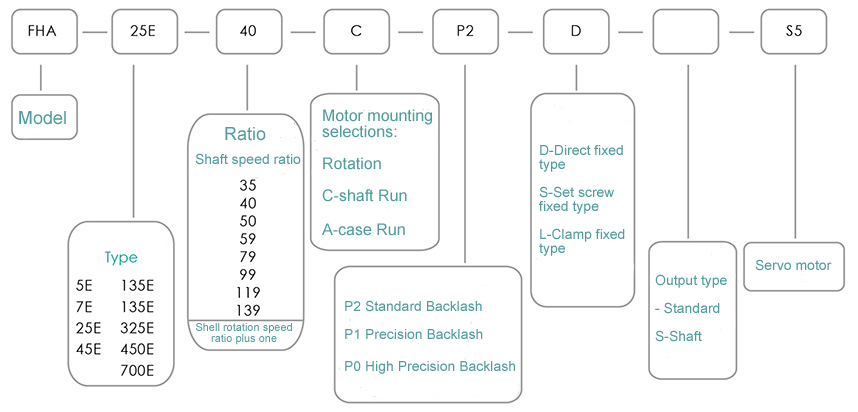
Indicação de Redutor de Robô Série FHA-E
Descrição do Redutor de Robô Série FHA-E
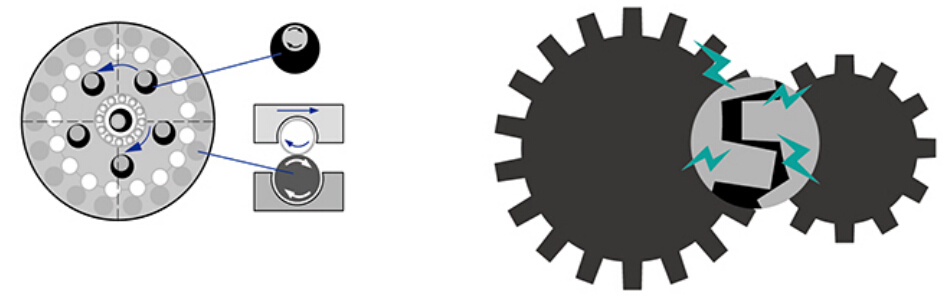
■ A capacidade de carga de impacto da caixa de engrenagens FHA-E é aprimorada, adotando a tecnologia descentralizada de carga de engate multi-engrenagem. Enquanto tradicionais engrenagens ou engrenagens helicoidais devem suportar o impacto da sobrecarga devido ao engate de apenas um dente.

■ A eficiência extremamente alta é obtida graças ao acionamento dos rolos externos e internos envolvidos no deslizamento e na rotação automática. Enquanto nos mecanismos tradicionais, a transmissão de torque não uniforme causada pela abrasão ou interferência de engrenagens.
■ Transmissão criativa, vantagens excepcionais
O redutor robótico da série FHA-E oferece todas as vantagens da caixa de engrenagens harmônicas, a escassez de flexspline.
Sem aumentar os estágios do redutor, a caixa de engrenagens do robô FHA-E pode fornecer altas taxas devido ao acionamento da engrenagem planetária. E o acionamento cicloidal oferece alta capacidade de carga sem vibração óbvia.
■ Alta eficiência com baixa perda de deslizamento
Todos os elementos deslizantes são compostos por rolos. Quando o rolo está rolando, o deslizamento também está envolvido e, portanto, a perda do mecanismo é quase ignorada e ganha uma eficiência superior de até 95% com apenas uma redução de estágio.
■ Operação suave com baixo ruído
O Redutor de Robô da Série FHA-E proporciona acoplamento de engrenagens com múltiplos dentes, ao mesmo tempo, construção de disco duplo contrabalançado de vibração compensada, alto coeficiente de sobreposição e contato de rolete com folga adequada para evitar a interferência como engrenagens, o que poderia reduzir o ruído e vibração de forma eficaz.
■ Alta precisão com baixa folga
Quase zero de folga do redutor robótico FHA-E graças ao acoplamento de engrenagens de dentes múltiplos e, portanto, o desvio de transmissão é de apenas 25% do redutor de engrenagens tradicional.
■ Alta saída de torque devido ao longo diâmetro do excitador de onda
O maior torque do redutor robótico FHA-E, devido ao maior diâmetro da onda de rolagem do que o disco tradicional, devido à característica regular da onda de rolamento.
■ Estrutura compacta com alta relação
A engrenagem do robô de estágio único FHA-E pode atingir uma alta razão, porque a quantidade de rolos no disco do rolete é igual à relação. O eixo de saída e o eixo de entrada do redutor robótico FHA-E estão em linha, cuja estrutura é reforçada e economiza espaço, assim a dimensão é mais compacta sob a mesma relação de redução de redutor de engrenagem e redutor de sem-fim.
O engate de múltiplos dentes contribui para uma alta capacidade de carga
Em comparação com a engrenagem de um dente do redutor ou do redutor, a caixa de engrenagens do robô FHT-A é caracterizada por 50% de engate simultâneo do mecanismo de rolamento de disco duplo, portanto a capacidade de carga é maior que o redutor tradicional.
■ O dente do rolo contribui para uma longa vida útil
Mecanismo robusto geral, livre de manutenção e longa vida útil devido ao acionamento do rolo criativo, excelente tecnologia e processo, contorno especial do rolete sem dentes quebrados.
■ Melhor benefício econômico devido ao baixo consumo de energia
Características do redutor robótico FHA-E de alta saída de torque, alta eficiência, baixa carga de operação, baixo consumo de energia e maior benefício econômico.
■ Design oco para saída direta
O redutor FHA-E RV é projetado de forma amigável com eixo oco e permite alinhar os tubos hidráulicos de roteamento e o cabo elétrico através do redutor FHA-E. E é fácil montar o motor através do acoplamento e flange do motor.
| Modelo | FHA-5E | FHE-7E | FHA-25E | FHA-45E | ||||||
| Rotação | Eixo Corre | Caso Corre | Eixo Corre | Caso Corre | Eixo Corre | Caso Corre | Eixo Corre | Caso Corre | ||
| Ratio | 40 | 41 | 40 | 41 | 40 | 41 | 35 | 36 | ||
| 50 | 51 | 50 | 51 | 50 | 51 | 40 | 41 | |||
| * | * | 59 | 60 | 60 | 61 | 50 | 51 | |||
| * | * | * | * | * | * | 59 | 60 | |||
| * | * | * | * | * | * | 79 | 80 | |||
| Torque nominal de saída | Nm kgf-m | 60 (6.1) | 83 (8.46) | 245 (25) | 460 (46.8) | |||||
| Aceleração e torque de frenagem | Nm kgf-m | 97.5 (9.9) | 136 (14) | 515 (52) | 1158 (118) | |||||
| Binário instantâneo Max.allowable | Nm kgf-m | 245 (25) | 415 (42) | 1000 (102) | 2300 (234.4) | |||||
| Velocidade nominal de entrada | Nr (rpm) | 2000 | 2000 | 2000 | 2000 | |||||
| Vida avaliado | Hora | 6000 | 6000 | 6000 | 6000 | |||||
| Velocidade permitida de Max.input | Nmax (rpm) | 3000 | 3000 | 3000 | 2500 | |||||
| Rigidez inclinada | Nm / arcmin kgf-m / arcmin | 82 (8.3) | 117 (12) | 372 (38) | 931 (95) | |||||
| Rigidez torcional | Nm / arcmin kgf-m / arcmin | 18 (1.83) | 20 (2) | 49 (5) | 108 (11) | |||||
| Movimento Max.lost | (arcmin) | < 3,0 | < 3,0 | < 3,0 | < 3,0 | |||||
| Erro de transmissão do ângulo | COMI (arcsec) | 40 | 80 | 40 | 40 | |||||
| Folga | Reviravolta padrão | (arcmin) | < 5,0 | < 5,0 | < 5,0 | < 5,0 | ||||
| Folga de precisão | < 3,0 | < 3,0 | < 3,0 | < 3,0 | ||||||
| Retrocesso de alta precisão | * | * | * | < 1,0 | ||||||
| Torque Max.tilting | Nm kgf-m | 282 (28,8) | 392 (40) | 1764 (180) | 3332 (340) | |||||
| Força radial nominal | Nm | 118 | 196 | 882 | 1666 | |||||
| Força max.axial | N | 885 | 1470 | 3920 | 5194 | |||||
| (Eu = GD2/ 4) Inércia de entrada Kg-m2 | 1,65x10-6 | 2,60 x 10-6 | 1,08 x 10-6 | 4,50 x 10-6 | ||||||
| 1,46x10-6 | 1,85x10-6 | 0,65x10-6 | 3,75x10-6 | |||||||
| * | 1,66x10-6 | 0,45x10-6 | 2,4x10-6 | |||||||
| * | * | * | 1,75x10-6 | |||||||
| * | * | * | 2,4x10-6 | |||||||
| Peso | KG | 4.5 | 8.5 | 12 | 32.5 | |||||
| Rotação | Eixo Corre | Caso Corre | Eixo Corre | Caso Corre | Eixo Corre | Caso Corre | Eixo Corre | Caso Corre | ||
| Ratio | 50 | 51 | 50 | 51 | 59 | 60 | 59 | 60 | ||
| 60 | 61 | 60 | 61 | 79 | 80 | 79 | 80 | |||
| 79 | 80 | 79 | 80 | 99 | 100 | 99 | 100 | |||
| 99 | 100 | 99 | 100 | 119 | 120 | 119 | 120 | |||
| * | * | * | * | * | * | 139 | 140 | |||
| Torque nominal de saída | Nm kgf-m | 1400 (136) | 1615 (165) | 3595 (366) | 5100 (520) | |||||
| Aceleração e torque de frenagem | Nm kgf-m | 2083 (212) | 4043 (412) | 7963 (812) | 11025 (1125) | |||||
| Binário instantâneo Max.allowable | Nm kgf-m | 4155 (423.5) | 8075 (823) | 17975 (1830) | 25500 (2600) | |||||
| Velocidade nominal de entrada | Nr (rpm) | 2000 | 1500 | 1500 | 1500 | |||||
| Vida avaliado | Hora | 6000 | 6000 | 6000 | 6000 | |||||
| Velocidade permitida de Max.input | Nmax (rpm) | 2500 | 2500 | 2000 | 2000 | |||||
| Rigidez inclinada | Nm / arcmin kgf-m / arcmin | 1176 (120) | 2940 (300) | 4900 (500) | 7448 (760) | |||||
| Rigidez torcional | Nm / arcmin kgf-m / arcmin | 196 (20) | 392 (40) | 980 (100) | 1176 (120) | |||||
| Movimento Max.lost | (arcmin) | < 1,5 | < 1,5 | < 1,5 | < 1,5 | |||||
| Erro de transmissão do ângulo | COMI (arcsec) | 40 | 40 | 40 | 40 | |||||
| Folga | Reviravolta padrão | (arcmin) | < 4,0 | < 4,0 | < 4,0 | < 4,0 | ||||
| Folga de precisão | < 2,0 | < 2,0 | < 2,0 | < 2,0 | ||||||
| Retrocesso de alta precisão | < 1,0 | < 1,0 | < 1,0 | < 1,0 | ||||||
| Torque Max.tilting | Nm kgf-m | 4312 (440) | 7840 (800) | 14112 (1440) | 17640 (1800) | |||||
| Força radial nominal | Nm | 2156 | 3920 | 7056 | 8820 | |||||
| Força max.axial | N | 7840 | 14700 | 19600 | 24500 | |||||
| (Eu = GD2/ 4) Inércia de entrada Kg-m2 | 5,65x10-5 | 1,9x10-4 | 6x10-4 | 9x10-4 | ||||||
| 4,40 x 10-5 | 1,8 x 10-4 | 5,4x10-4 | 7,3x10-4 | |||||||
| 3,53x10-5 | 1,78x10-4 | 4x10-4 | 6x10-4 | |||||||
| 2,63x10-5 | 1,51x10-4 | 2,8 x 10-4 | 4,8 x 10-4 | |||||||
| * | * | * | 4,2x10-4 | |||||||
| Peso | KG | 32.5 | 37 | 65 | 81 | |||||


produtos relacionados
 Caixa de engrenagens do robô da série RV-E
Caixa de engrenagens do robô da série RV-E- Caixa de engrenagens do robô da série de FHD-C
- Caixa de engrenagens do robô da série RV-M
- Caixa de engrenagens do robô da série RV-C
- Caixa de engrenagens harmônicas da série SHD
- Motor de engrenagem PC-NMRV
- Conjunto de componentes CSG / CSF da caixa de engrenagens harmônicas
- Caixa de engrenagens planetária de ângulo direito PAR Precision
- Estrutura principal do processo e tecnologia patenteada da caixa de engrenagens planetária TQG
- Caixa de engrenagens planetária da saída da flange da elevada precisão da ALMOFADA