Översiew of FHA-E-serien Robotreducerare
Översiew of FHA-E-serien Robotreducerare
 Översiew of FHA-E-serien Robotreducerare
Översiew of FHA-E-serien Robotreducerare- Typ: FHA-5E ~ FHA-450E
- Backlash: ≤1-5 Arc.min
- Förhållande: 1/35 ~ 1/140
- Kapacitet: 0.1kw ~ 15kw
- Rotation: Axelkörning eller fall sol
- Nominellt utgångsmoment: 60Nm ~ 5100Nm
- Direktutgång, snäva ingrepp och hög precision
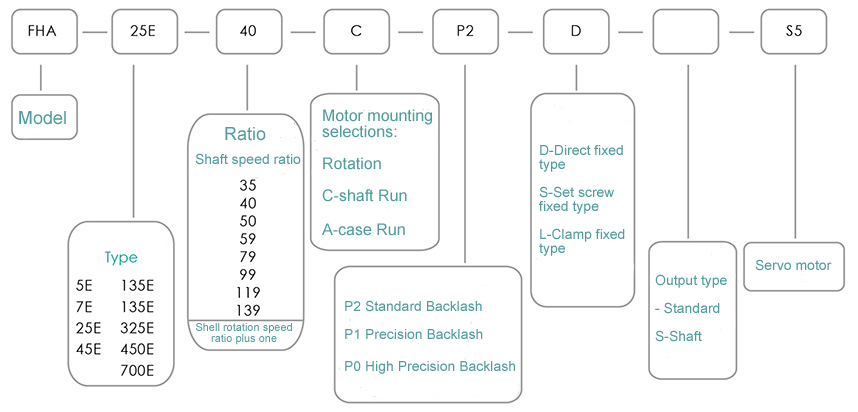
Indikation av FHA-E-serien Robotreducerare
Beskrivning av FHA-E-serien Robotreducerare
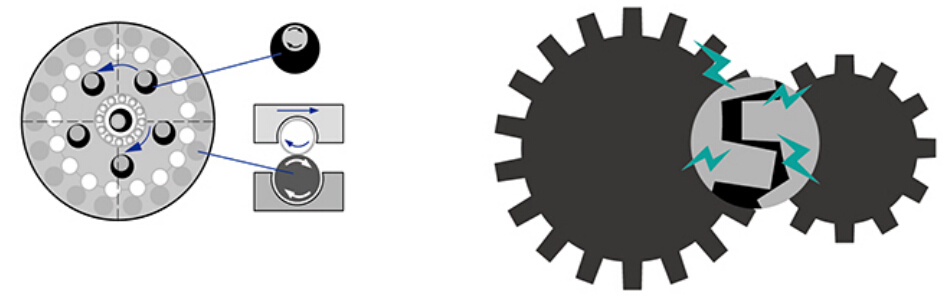
■ FHA-E-växellådans belastningsbelastning förbättras kraftigt genom att anta lastdentraliserad teknik för växling med flera växlar. Medan traditionella spårväxlar eller spiralformade växlar måste klara överbelastningsskador på grund av ingreppsförbindelsen av endast en tand.

■ Extremt hög effektivitet uppnås tack vare drivningen av externa och inre rullar som involverar glidning och självrotation. Under de traditionella mekanismerna orsakas den osmälta vridmomentöverföringen som orsakas av krossning eller störning av kugghjul.
■ Kreativ överföring, enastående fördelar
FHA-E-serien Robot Reducer ger alla fördelar med harmonisk växellåda negativa bristerna på flexplint.
Utan att öka reduceringsstadierna kan FHA-E robot växellåda ge höga förhållanden på grund av planetväxeln. En cykeldrivning ger hög lastkapacitet utan uppenbar vibration.
■ Hög effektivitet med låg glidförlust
Alla glidelement består av rulle. När valsen rullar, är glidning också inblandad, och därför är mekanismens förlust nästan ignorerad och uppnådde överlägsen hög effektivitet upp till 95% under enstegsreduktion.
■ Smidig drift med låg ljudnivå
FHA-E-serien Robot Reducer ger flera tänder meshing ingrepp samtidigt som motvikt twin-disc konstruktion av offset vibrationer, hög överlappskoefficient och rullkontakt med lämplig lucka för att undvika störningar som växlar, vilket skulle kunna minska bullret och vibrering effektivt.
■ Hög precision med låg backlash
Nästan nollstöd av FHA-E robotreducerare tack vare multi-tänder meshing-ingrepp, och därför är överföringsavvikelsen endast 25% av den traditionella växellåda.
■ Högt vridmomentutgång på grund av lång diameter av vågspänning
Det högre vridmomentet för FHA-E robotreducerare på grund av den större valsens valsvals av valsöverföring än traditionell skiva på grund av den rullande vågens vanliga funktion.
■ Kompakt struktur med högt förhållande
Enstegs FHA-E robotväxel kan uppnå högt förhållande eftersom antalet rullar på rullskivan är lika med förhållandet. Utgående axel och inmatningsaxel av FHA-E robotreducerare är i linje, vars konstruktion är förstärkt och rymdbesparande, så är dimensionen mer kompakt under samma reduktionsförhållande växelspänningsreducer och maskreducerare.
■ Multi-tänder engagemang bidrar till hög belastningsförmåga
Jämfört med en tandmaskning av snäckväxellåda eller växellåda, presenteras FHT-A robotväxellåda med 50% rullar i ingreppsförlopp samtidigt med dubbelskivor, varför lastkapaciteten är högre än traditionell växellåda.
■ Rollertand bidrar till lång livslängd
Övergripande robust mekanism, fri från underhåll och lång livslängd på grund av den kreativa rulldriften, enastående teknik och process, speciell rulleplan utan brutna tänder.
■ Bättre ekonomisk fördel på grund av låg energiförbrukning
FHA-E robotreduceringsfunktioner med högt vridmomentutförande, hög effektivitet, låg driftsbelastning, låg energiförbrukning och högre ekonomisk nytta.
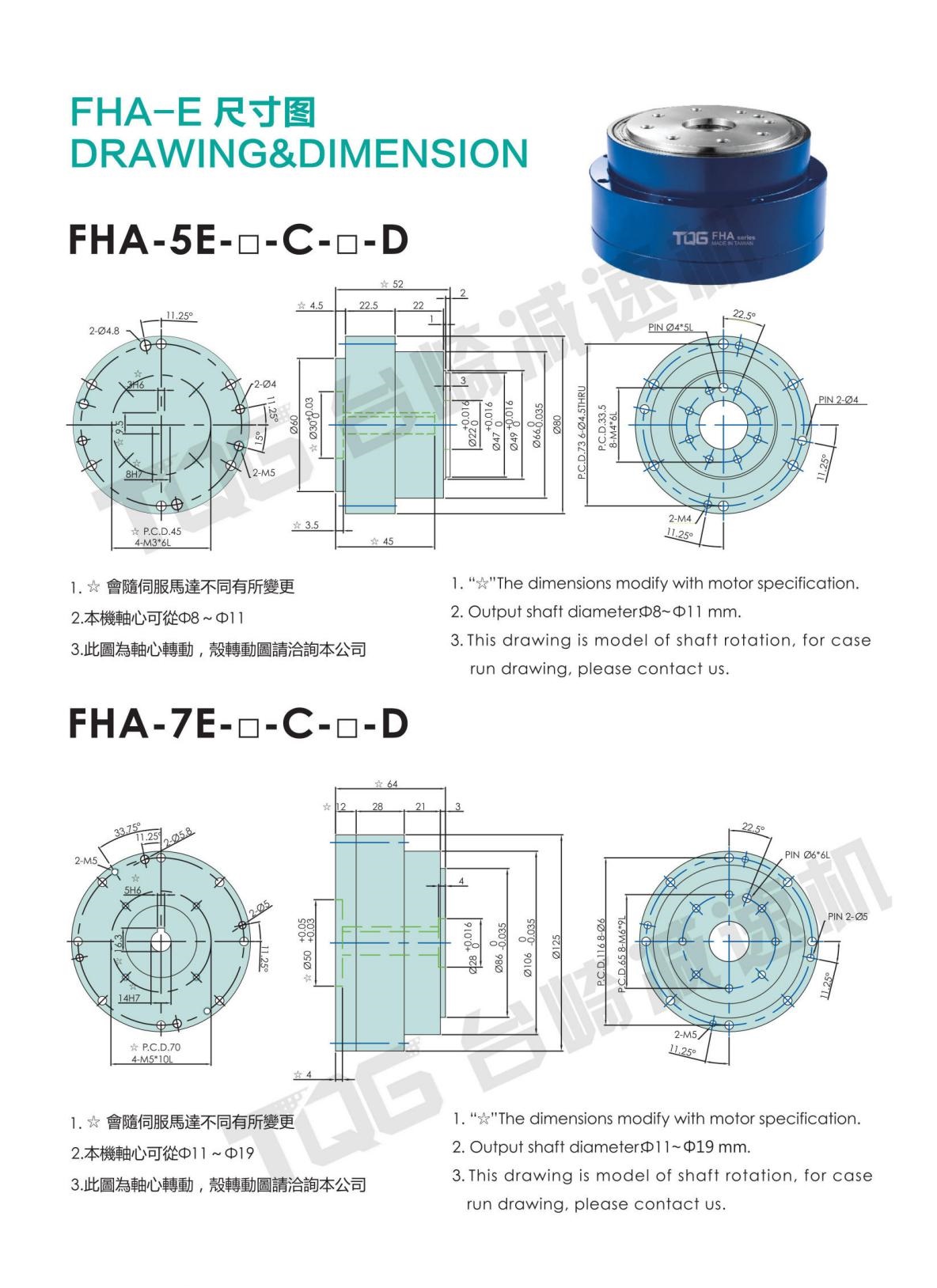
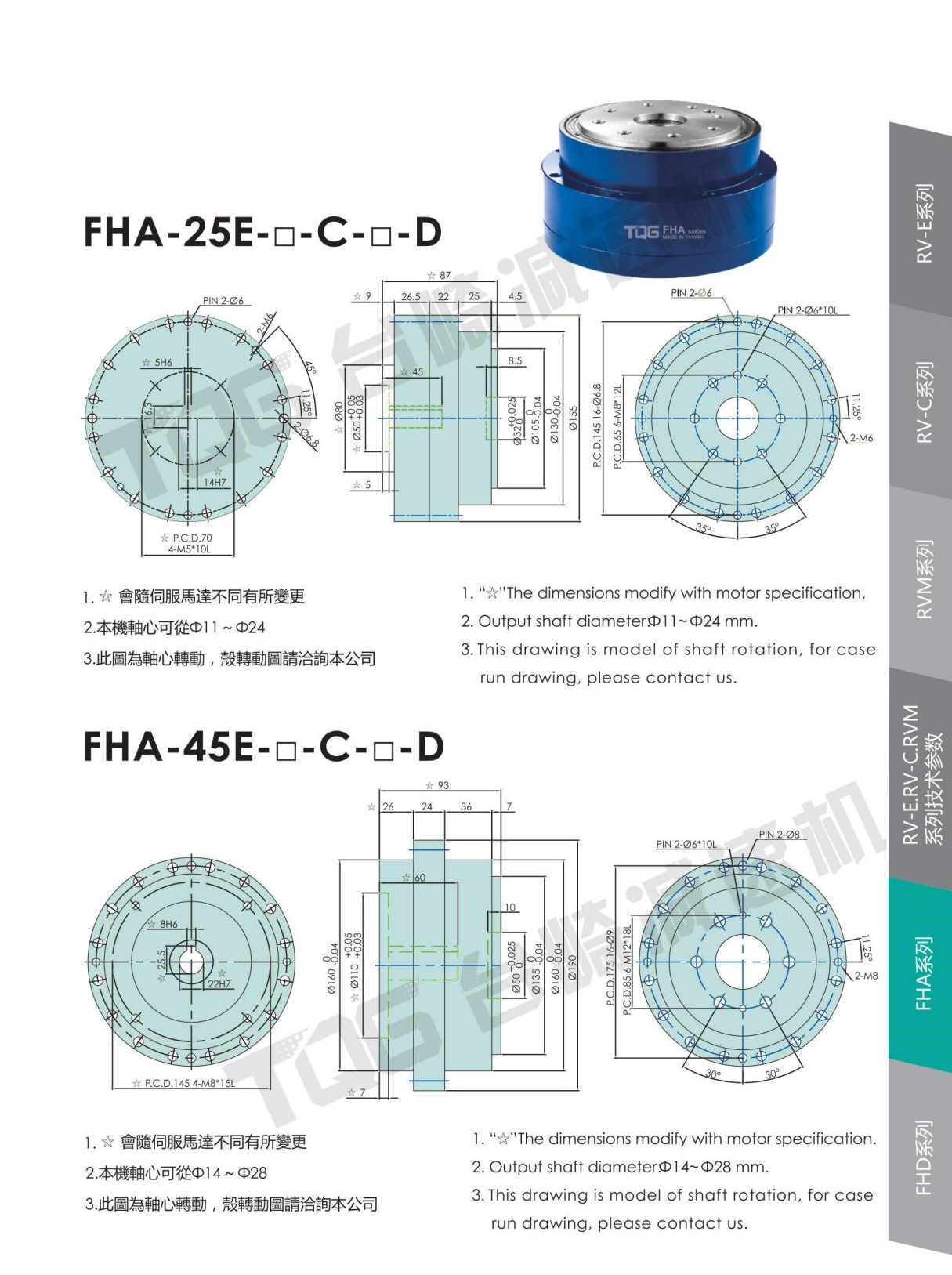
■ Hål design för direktutgång
FHA-E RV reducer är designad vänlig med ihålig axel och gör det möjligt att mata routing hydrauliska rör och elektriska kabel via FHA-E reduceraren. Och det är lätt att montera motorn genom koppling och motorfläns.
| Modell | FHA-5E | FHE-7E | FHA-25E | FHA-45E | ||||||
| Rotation | Axel Springa | Fall Springa | Axel Springa | Fall Springa | Axel Springa | Fall Springa | Axel Springa | Fall Springa | ||
| Förhållande | 40 | 41 | 40 | 41 | 40 | 41 | 35 | 36 | ||
| 50 | 51 | 50 | 51 | 50 | 51 | 40 | 41 | |||
| * | * | 59 | 60 | 60 | 61 | 50 | 51 | |||
| * | * | * | * | * | * | 59 | 60 | |||
| * | * | * | * | * | * | 79 | 80 | |||
| Nominellt ouputmoment | nm kgf-m | 60 (6.1) | 83 (8.46) | 245 (25) | 460 (46.8) | |||||
| Acceleration och bromsmoment | nm kgf-m | 97.5 (9.9) | 136 (14) | 515 (52) | 1158 (118) | |||||
| Instant Max.allowable vridmoment | nm kgf-m | 245 (25) | 415 (42) | 1000 (102) | 2300 (234.4) | |||||
| Nominell ingångshastighet | Nr (Rpm) | 2000 | 2000 | 2000 | 2000 | |||||
| Nominell livslängd | Hr | 6000 | 6000 | 6000 | 6000 | |||||
| Tillåten Max.inmatningshastighet | nmax (Rpm) | 3000 | 3000 | 3000 | 2500 | |||||
| Tiltande styvhet | Nm / arcmin kgf-m / arcmin | 82 (8.3) | 117 (12) | 372 (38) | 931 (95) | |||||
| Torsionsstyvhet | Nm / arcmin kgf-m / arcmin | 18 (1.83) | 20 (2) | 49 (5) | 108 (11) | |||||
| Maximalaste rörelse | (Arcmin) | <3,0 | <3,0 | <3,0 | <3,0 | |||||
| Vinkelöverföringsfel | ATE (Arcsec) | 40 | 80 | 40 | 40 | |||||
| Glapp | Standard backlash | (Arcmin) | <5,0 | <5,0 | <5,0 | <5,0 | ||||
| Precision backlash | <3,0 | <3,0 | <3,0 | <3,0 | ||||||
| Hög precision bakslag | * | * | * | <1,0 | ||||||
| Max.tilting vridmoment | nm kgf-m | 282 (28,8) | 392 (40) | 1764 (180) | 3332 (340) | |||||
| Nominell radiell kraft | nm | 118 | 196 | 882 | 1666 | |||||
| Maxaxialkraft | N | 885 | 1470 | 3920 | 5194 | |||||
| (I = GD2/ 4) Inmatning inerti Kg-m2 | 1.65x10-6 | 2.60x10-6 | 1.08x10-6 | 4.50x10-6 | ||||||
| 1.46x10-6 | 1.85x10-6 | 0.65x10-6 | 3.75x10-6 | |||||||
| * | 1.66x10-6 | 0.45x10-6 | 2,4x10-6 | |||||||
| * | * | * | 1.75x10-6 | |||||||
| * | * | * | 2,4x10-6 | |||||||
| Vikt | KG | 4.5 | 8.5 | 12 | 32.5 | |||||
| Rotation | Axel Springa | Fall Springa | Axel Springa | Fall Springa | Axel Springa | Fall Springa | Axel Springa | Fall Springa | ||
| Förhållande | 50 | 51 | 50 | 51 | 59 | 60 | 59 | 60 | ||
| 60 | 61 | 60 | 61 | 79 | 80 | 79 | 80 | |||
| 79 | 80 | 79 | 80 | 99 | 100 | 99 | 100 | |||
| 99 | 100 | 99 | 100 | 119 | 120 | 119 | 120 | |||
| * | * | * | * | * | * | 139 | 140 | |||
| Nominellt ouputmoment | nm kgf-m | 1400 (136) | 1615 (165) | 3595 (366) | 5100 (520) | |||||
| Acceleration och bromsmoment | nm kgf-m | 2083 (212) | 4043 (412) | 7963 (812) | 11025 (1125) | |||||
| Instant Max.allowable vridmoment | nm kgf-m | 4155 (423.5) | 8075 (823) | 17975 (1830) | 25500 (2600) | |||||
| Nominell ingångshastighet | Nr (Rpm) | 2000 | 1500 | 1500 | 1500 | |||||
| Nominell livslängd | Hr | 6000 | 6000 | 6000 | 6000 | |||||
| Tillåten Max.inmatningshastighet | nmax (Rpm) | 2500 | 2500 | 2000 | 2000 | |||||
| Tiltande styvhet | Nm / arcmin kgf-m / arcmin | 1176 (120) | 2940 (300) | 4900 (500) | 7448 (760) | |||||
| Torsionsstyvhet | Nm / arcmin kgf-m / arcmin | 196 (20) | 392 (40) | 980 (100) | 1176 (120) | |||||
| Maximalaste rörelse | (Arcmin) | <1,5 | <1,5 | <1,5 | <1,5 | |||||
| Vinkelöverföringsfel | ATE (Arcsec) | 40 | 40 | 40 | 40 | |||||
| Glapp | Standard backlash | (Arcmin) | <4,0 | <4,0 | <4,0 | <4,0 | ||||
| Precision backlash | <2,0 | <2,0 | <2,0 | <2,0 | ||||||
| Hög precision bakslag | <1,0 | <1,0 | <1,0 | <1,0 | ||||||
| Max.tilting vridmoment | nm kgf-m | 4312 (440) | 7840 (800) | 14112 (1440) | 17640 (1800) | |||||
| Nominell radiell kraft | nm | 2156 | 3920 | 7056 | 8820 | |||||
| Maxaxialkraft | N | 7840 | 14700 | 19600 | 24500 | |||||
| (I = GD2/ 4) Inmatning inerti Kg-m2 | 5.65x10-5 | 1,9x10-4 | 6x10-4 | 9x10-4 | ||||||
| 4.40x10-5 | 1,8x10-4 | 5.4x10-4 | 7.3x10-4 | |||||||
| 3.53x10-5 | 1.78x10-4 | 4x10-4 | 6x10-4 | |||||||
| 2.63x10-5 | 1.51x10-4 | 2.8x10-4 | 4.8x10-4 | |||||||
| * | * | * | 4.2x10-4 | |||||||
| Vikt | KG | 32.5 | 37 | 65 | 81 | |||||


Relaterade produkter
 RV-E serie robot växellåda
RV-E serie robot växellåda- FHD-C serie robot växellåda
- RV-M-serie robot växellåda
- RV-C serie robot växellåda
- SHD-serien Harmonisk växellåda
- PC-NMRV Gear Motor
- CSG / CSF-komponentuppsättning med harmonisk växellåda
- PAR Precision Right Angle Planetary Gearbox
- Huvudprocessstruktur och patenterad teknik för TQG planetväxel
- PAD High Precision Flange Output Planetary Gearbox