ภาพรวม ของ AT-FL1 / R1 Speed Reducer
ภาพรวม ของ AT-FL1 / R1 Speed Reducer
 ภาพรวม ของ AT-FL1 / R1 Speed Reducer
ภาพรวม ของ AT-FL1 / R1 Speed Reducer- การกำหนดค่าเอาต์พุตเพลาเดี่ยว
- เพลาส่งออกขวา (AT-FL1) หรือซ้าย (AT-FL1) สำหรับการเลือก
- 3 ขั้นตอนด้วยอัตราส่วนการลดตั้งแต่ 1 ~ 500
- เก้ารุ่นสำหรับกระปุกเกียร์แบบ 1 จังหวะและ 2 จังหวะและหกรุ่นสำหรับเกียร์ 3 จังหวะ
- ประเภทอินพุตแปลนของเซอร์โวกระปุก
- 6 ~ 10 อาร์มินแบ็กแลชที่มีอัตราส่วนการลดต่างกัน
- แรงบิดสูงถึง 8000 นิวตันเมตรและประสิทธิภาพสูงถึง 98%
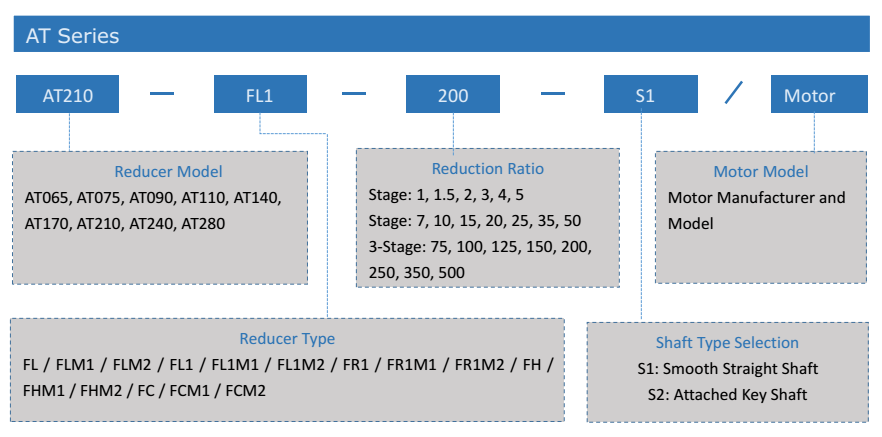
การบ่งชี้หมายเลขรุ่นของกระปุกเกียร์ ATF
descriptไอออนของ AT-FL1 / FR1 สูง ความแม่นยำ Servo กระปุกเกียร์
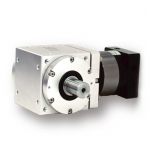
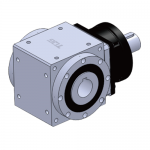
กล่องเกียร์ดาวเคราะห์ซีรีย์ TQG AT-FL1 / AT-FR1 เป็นตัวลดความเร็วเซอร์โวพร้อมเพลาส่งออกเดี่ยวและการกำหนดค่าอินพุตแบบหน้าแปลนด้านมอเตอร์ AT-FL1 / AT-FR1 เป็นกระปุกเกียร์มุมฉากที่มีเฟืองเฉียงแบบเกลียวซึ่งก่อให้เกิดความแม่นยำสูงและความสามารถในการโหลดรัศมีสูง มีการจับคู่กันอย่างแพร่หลายสำหรับเซอร์โวมอเตอร์และสเต็ปเปอร์มอเตอร์ทุกยี่ห้อในตลาด
กล่องเกียร์มุมฉากมีสามขั้นตอน:
1 ขั้น (อัตราส่วนลด i = 1 ~ 5)
รุ่น: AT065 FL1 / FR1, AT075 FL1 / FR1, AT090 FL1 / FR1, AT110 FL1 / FR1, AT140 FL1 / FR1, AT170 FL1 / FR1, AT210 FL1 / FR1, AT240 FL1 / FR1, AT280 FL1 / FR1
2- เวที (อัตราส่วนลด i = 7 ~ 50)
รุ่น: AT065 FL1 / FR1, AT075 FL1 / FR1, AT090 FL1 / FR1, AT110 FL1 / FR1, AT140 FL1 / FR1, AT170 FL1 / FR1, AT210 FL1 / FR1, AT240 FL1 / FR1, AT280 FL1 / FR1
3-Stage (อัตราส่วนลด i = 75 ~ 500)
รุ่น: AT110 FL1 / FR1, AT140 FL1 / FR1, AT170 FL1 / FR1, AT210 FL1 / FR1, AT240 FL1 / FR1, AT280 FL1 / FR1
Q.hy กำลังส่งออกของ ลดความแม่นยำของดาวเคราะห์มีขนาดเล็กเกินไป?
หากแรงขับของกระปุกเกียร์ดาวเคราะห์มีความแม่นยำมีขนาดเล็กเกินไปเพลาก็จะแตกได้ง่าย และสาเหตุที่นำไปสู่เงื่อนไขนี้ได้อย่างง่ายดายคืออะไร?
ก่อนอื่นการเลือกรุ่นผิดส่งผลให้แรงบิดเอาต์พุตไม่เพียงพอของตัวลดเกียร์ดาวเคราะห์ที่มีความแม่นยำซึ่งติดตั้งอยู่ เมื่อเลือกแบบจำลองผู้ใช้บางคนเชื่ออย่างผิด ๆ ว่าตราบใดที่แรงบิดที่ระบุไว้ของตัวลดความแม่นยำของดาวเคราะห์ที่เลือกสามารถตอบสนองความต้องการในการทำงานได้ จริงๆแล้วมันไม่จริง ประการแรกแรงบิดเอาต์พุตที่ได้รับการจัดอันดับของมอเตอร์ที่จับคู่นั้นคูณด้วยอัตราส่วนการลดเท่ากับข้อมูลซึ่งโดยหลักการแล้วควรมีขนาดเล็กกว่าแรงบิดเอาต์พุตที่เสนอชื่อของตัวลดดาวเคราะห์ที่คล้ายกันในแคตตาล็อก ประการที่สองควรคำนึงถึงความสามารถในการโอเวอร์โหลดของมอเตอร์ขับเคลื่อนและแรงบิดในการทำงานสูงสุดที่เกิดขึ้นจริงในเวลาเดียวกัน ในทางทฤษฎีแรงบิดสูงสุดที่ผู้ใช้ต้องการจะต้องน้อยกว่า 2 เท่าของแรงบิดเอาต์พุตที่กำหนดของตัวลดดาวเคราะห์




สินค้าที่เกี่ยวข้อง
 AAW-A (B) SP เอาต์พุตเดี่ยวเพลาความแม่นยำกระปุกมุมขวา
AAW-A (B) SP เอาต์พุตเดี่ยวเพลาความแม่นยำกระปุกมุมขวา- PT-CK กระปุกเกียร์พวงมาลัยแบบกลวงที่มีเพลาเดียว
- PAW-CK Single Hollow Shaft Key Groove Bevel Gearbox
- AT-FL สองเพลาหน้าแปลนป้อนข้อมูลกระปุกเกียร์ 90 องศา
- กระปุกเกียร์หมุนวนเอียง AT-H Hole
- PAW-P เพลาส่งออกเดี่ยวมุมขวากระปุก
- PT-P กระปุกเกียร์เพลาขับเดี่ยว
- กระปุกเกียร์พวงมาลัยแบบคีย์กลวง PT-CR
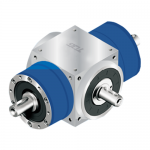
- AT-LM (RM) เพลาส่งออกคู่ที่อยู่ตรงข้ามกับกระปุกเกียร์บังคับทิศทาง
- AAW-A (B) S-RFK ประเภทหน้าแปลนกล่องเกียร์มุมขวา