Огляд ZK Планетарний редуктор
Огляд ZK Планетарний редуктор
 Огляд ZK Планетарний редуктор
Огляд ZK Планетарний редуктор- Обертається поверхня диска може безпосередньо заблокувати робочі об'єкти, а отже, підвищити зручність перенесення заготовки.
- Обертається платформа зручна для проводки або трубопроводів.
- Альтернативи Д. д. Двигуна і кулачкового дільника.
- Висока точність позиціонування. Повторна точність позиціонування становить ± 15 сек, а точність холостого ходу - 2 хв.
- Пряме з'єднання - проста конструкція підвищує довіру.
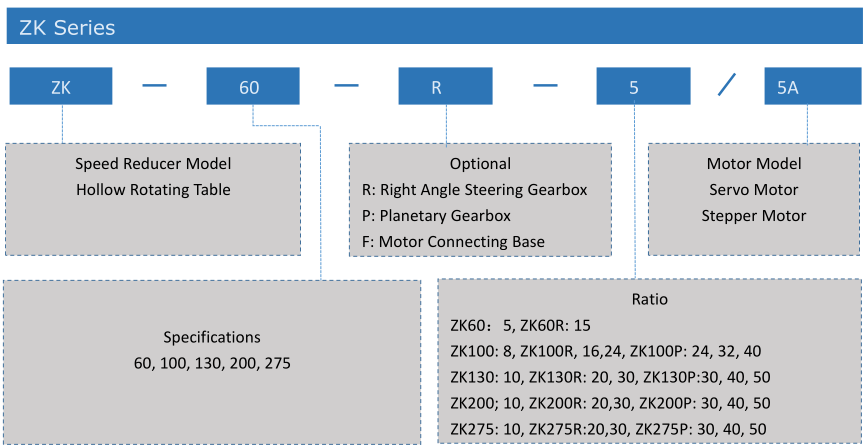
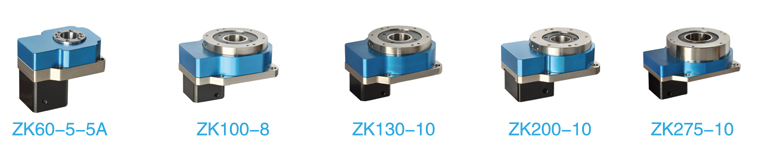
Індикація модельних чисел поворотних поворотів ZK

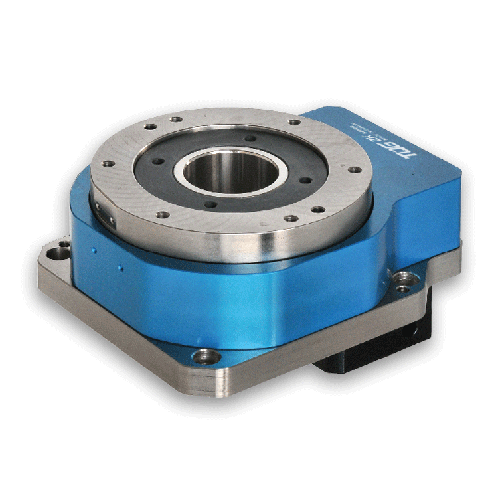
Опис поворотного столу ZK Hollow
Поворотний привід серії ZK - новий тип обертового навантажувального пристрою, який належить до планетарного редуктора швидкості сервоприводу. Використання жорстких поперечних роликових кутових роликових підшипників і поворотної конструкції поверхні платформи, може витримати велику інерцію дискового пристрою, всю групу з кроковим двигуном і водієм. Zk порожній поворотний стіл поєднує в собі особливості високої ефективності передачі, високу точність, високу жорсткість і високу економічність. Більш того, редуктор ZK інтегрував переваги серводвигунів, ділянок кулачків і двигунів з прямим приводом.
Рухи прямих ліній і кругові рухи - це два види механічних рухів. Лінійні руху в основному засновані на різних типах слайдів, тоді як кругові рухи є найбільш репрезентативним рухом кулачкових покажчиків. А завдяки зрілості технології та вимоги до точності обладнання, Д. Д. мотор стає все більш і більш популярним. Однак традиційний роздільник не в змозі задовольнити потреби будь-якої сегментації. Хоча Д. Д. Мотор може застосовуватися кількома способами і з високою точністю, його висока ціна є основними факторами, які роблять користувача переглядати. Порожнистий обертовий стіл серії ZK успішно отримав баланс між кулачковими індексаторами і двигуном DD. Вона заповнює функціональні вимоги, які не тільки можуть значно знизити вартість ДВ двигуна, але також можуть задовольнити високу точність і цифрове керування, що не може забезпечити дільник камери.
У механізмі зниження швидкості використовуються ультра-прецизійні зубчасті передачі для усунення люфту через власний механізм регулювання, таким чином, не буде люфтів у частині механізму. Оскільки повторна точність позиціонування становить ± 15 сек в одному напрямку, а точність холостого ходу - 2 хв у двох напрямках, можливе позиціонування з високою точністю.
Робочий стіл і робот-рама обладнання можуть бути встановлені безпосередньо на порожній вивідній платформі. При загальному обладнанні позиціонує і працює за допомогою шківів і інших механічних частин. В основному це впливає на ефективність передачі механічних частин, і тому точність зменшується, або існує потреба у підтримці частин механізму. Хоча порожнисті поворотні приводи серії ZK можуть бути встановлені безпосередньо без проміжних частин. Таким чином, окрім безпосереднього використання самого приводу, можна уникнути технічного обслуговування.
Застосування поворотного повороту ZK
- Робот легкого навантаження
- Лазерне маркування або поворотний патрон в гравірувальній машині
- Поворотний вал у механізмі точного вирівнювання
Шість основних застосувань ZK Planetary Gearbox
1.Інтеріальність зміни навантаження
2. Високоточне позиціонування
Додаток завантаження інерції
4. Високоточне позиціонування за допомогою порожнього отвору
5.Оптимізація використання порожнистого отвору
6.Відбір порожнистого отвору
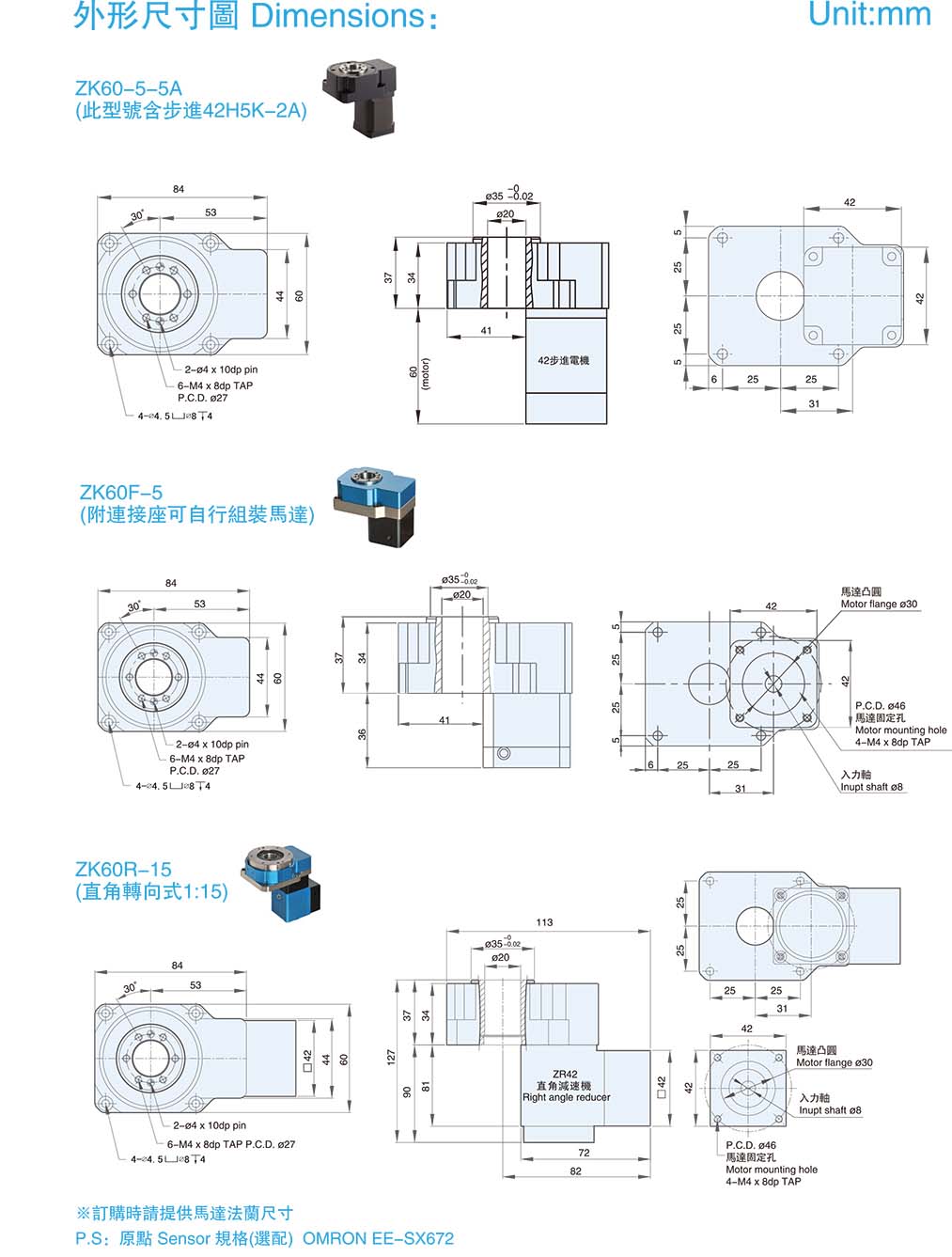
| Модель | ZK60 | ZK60R |
| Підшипник столу повороту | Кулька для поглиблення канавок + упорний кульковий підшипник | |
| Допуск обертального моменту | 5 | |
| Термін служби | 15000год | |
| Швидкість дозволу (об / хв) | 200 (тарілка) | |
| Співвідношення | 5 | 15 |
| Повторити точність (дуга-сек) | ≤15 | ≤20 |
| Точність позиції (дуга-хв) | ≤1 | ≤1 |
| Паралельність обертання пластини мм | ≤0,02 | |
| Коаксіальність обертання пластини мм | ≤0,02 | |
| Клас захисту | IP40 | |
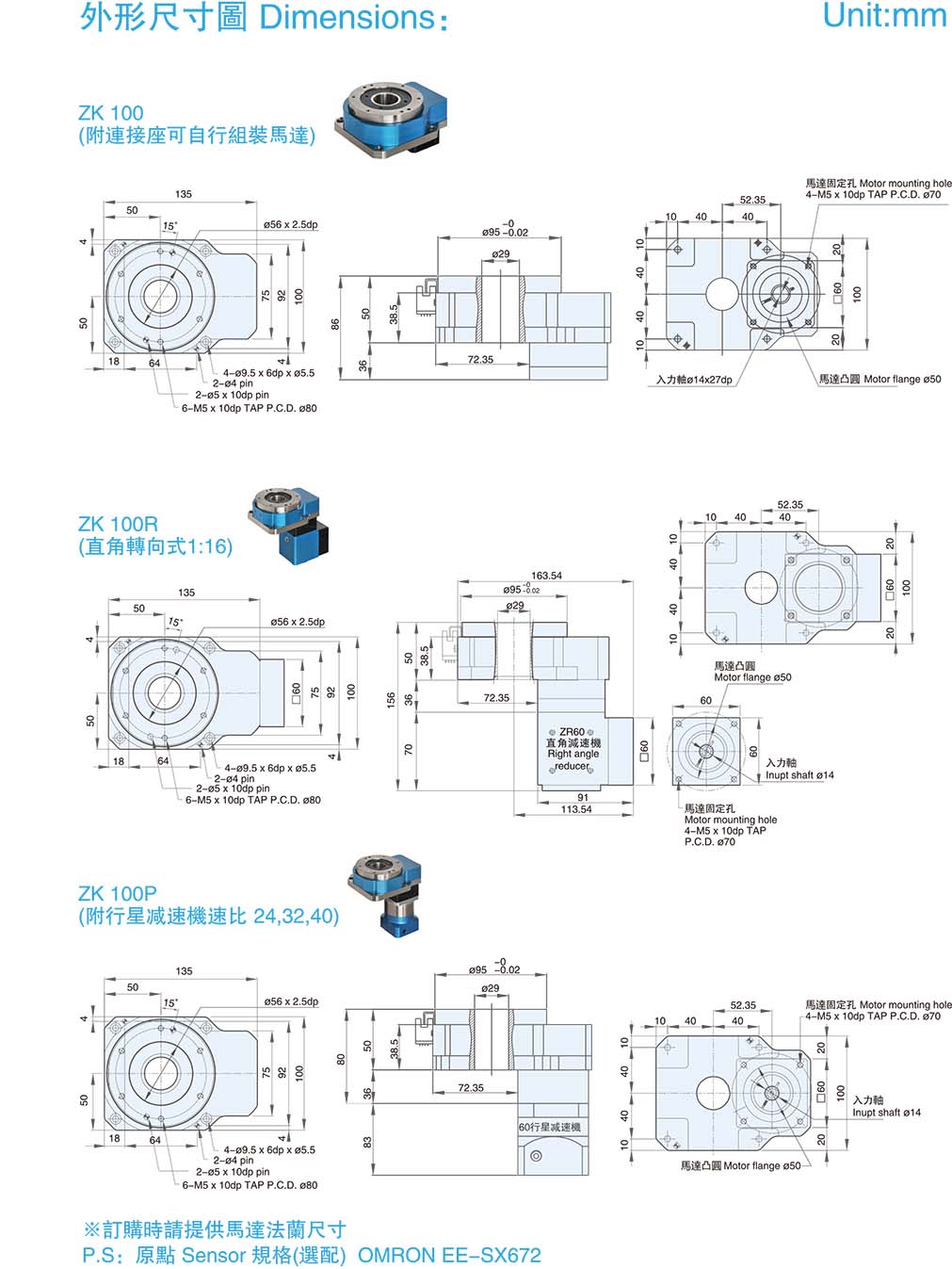
| Модель | ZK100 | ZK100R | ZK100P |
| Підшипник столу повороту | Конічний роликовий підшипник | ||
| Допуск обертального моменту | 45 | ||
| Термін служби | 20000год | ||
| Швидкість дозволу (об / хв) | 200 (тарілка) | ||
| Співвідношення | 8 | 16,24 | 24,32,40 |
| Повторити точність (дуга-сек) | ≤10 | ≤20 | ≤60 |
| Точність позиції (дуга-хв) | ≤1 | ≤1 | ≤2 |
| Паралельність обертання пластини мм | ≤0,02 | ||
| Коаксіальність обертання пластини мм | ≤0,015 | ||
| Клас захисту | IP40 | ||
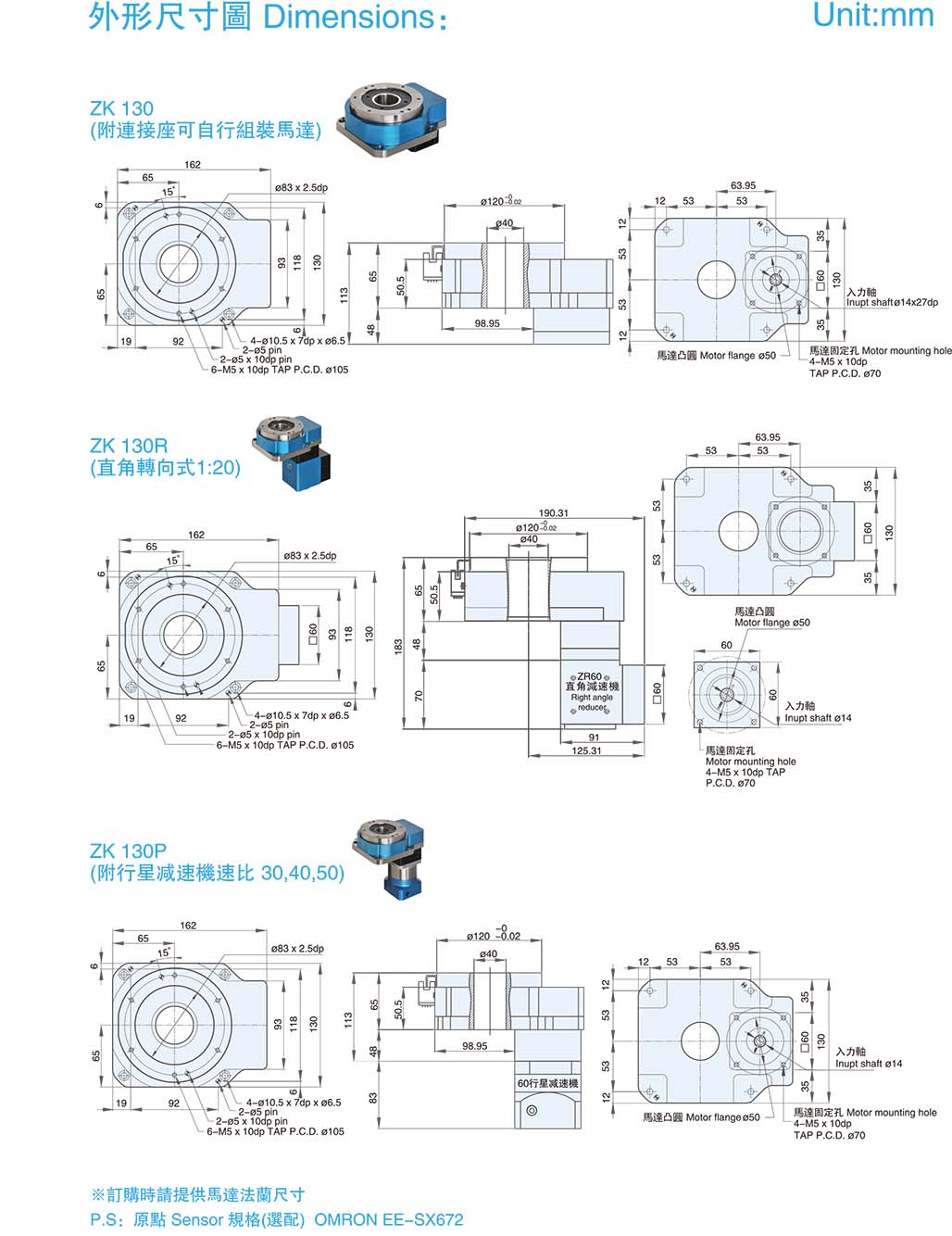
| Модель | ZK130 | ZK130R | ZK130P |
| Підшипник столу повороту | Конічний роликовий підшипник | ||
| Допуск обертального моменту | 45 | ||
| Термін служби | 20000год | ||
| Швидкість дозволу (об / хв) | 200 (тарілка) | ||
| Співвідношення | 10 | 20,30 | 30,40,50 |
| Повторити точність (дуга-сек) | ≤10 | ≤20 | ≤60 |
| Точність позиції (дуга-хв) | ≤1 | ≤1 | ≤2 |
| Паралельність обертання пластини мм | ≤0,02 | ||
| Коаксіальність обертання пластини мм | ≤0,015 | ||
| Клас захисту | IP40 | ||
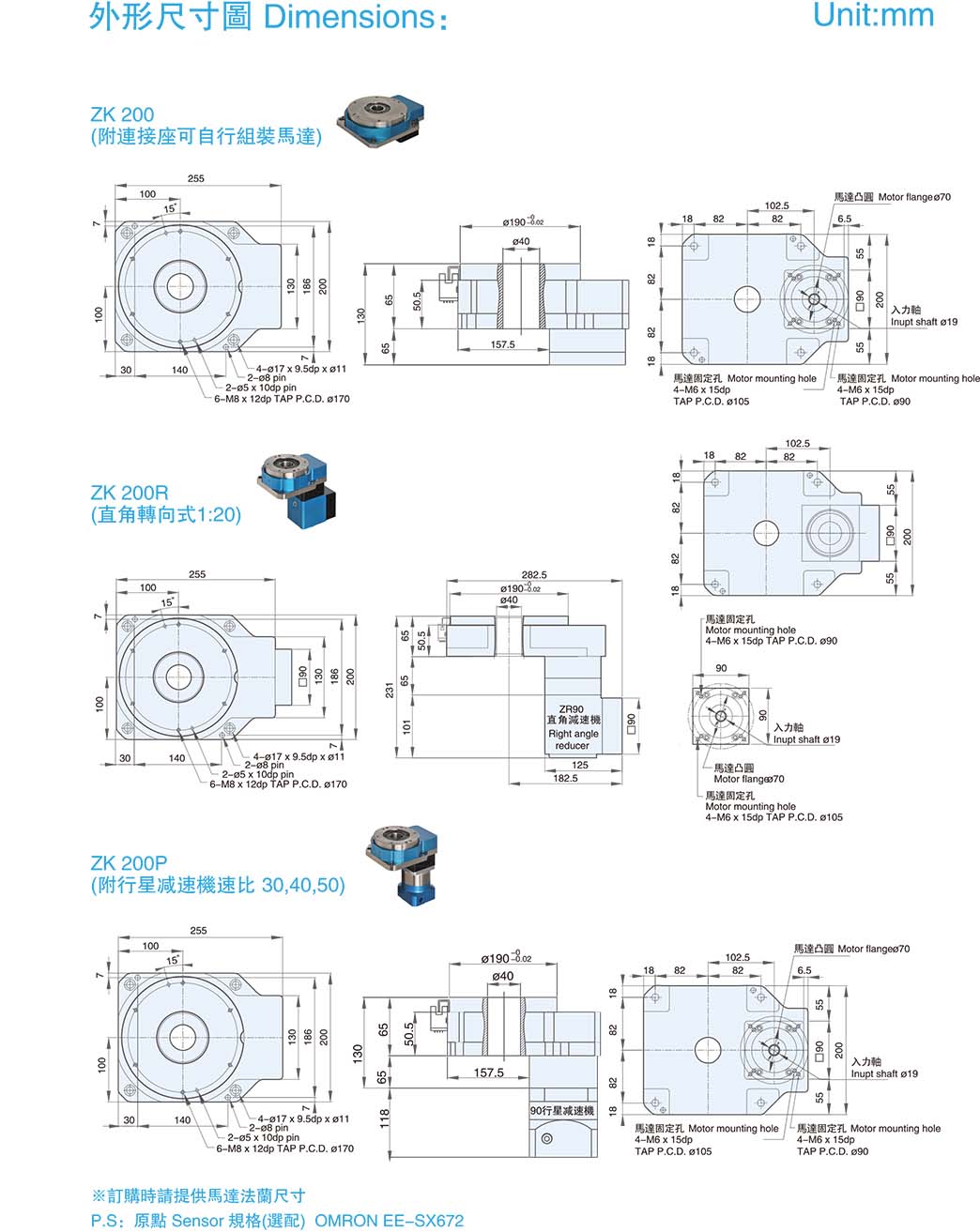
| Модель | ZK200 | ZK200R | ZK200P |
| Підшипник столу повороту | Конічний роликовий підшипник | ||
| Допуск обертального моменту | 80 | ||
| Термін служби | 20000год | ||
| Швидкість дозволу (об / хв) | 200 (тарілка) | ||
| Співвідношення | 10 | 20,30 | 30,40,50 |
| Повторити точність (дуга-сек) | ≤10 | ≤20 | ≤60 |
| Точність позиції (дуга-хв) | ≤1 | ≤1 | ≤2 |
| Паралельність обертання пластини мм | ≤0,02 | ||
| Коаксіальність обертання пластини мм | ≤0,015 | ||
| Клас захисту | IP40 | ||
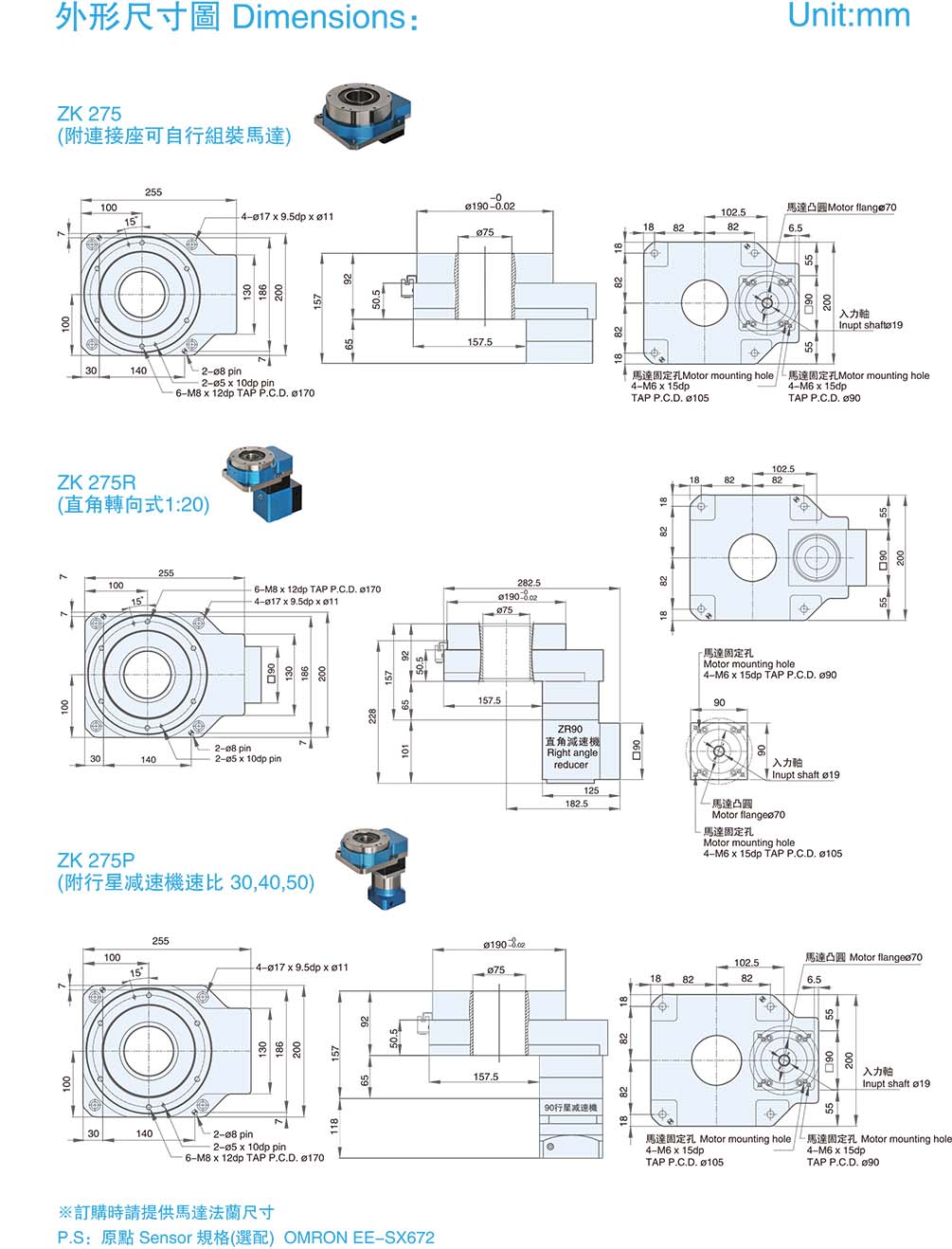
| Модель | ZK275 | ZK275R | ZK275P |
| Підшипник столу повороту | Конічний роликовий підшипник | ||
| Допуск обертального моменту | 80 | ||
| Термін служби | 20000год | ||
| Швидкість дозволу (об / хв) | 200 (тарілка) | ||
| Співвідношення | 10 | 20,30 | 30,40,50 |
| Повторити точність (дуга-сек) | ≤10 | ≤20 | ≤60 |
| Точність позиції (дуга-хв) | ≤1 | ≤1 | ≤2 |
| Паралельність обертання пластини мм | ≤0,02 | ||
| Коаксіальність обертання пластини мм | ≤0,015 | ||
| Клас захисту | IP40 | ||





Супутні товари
 DG Порожнистий поворотний привід
DG Порожнистий поворотний привід- PADR Високоточний прямокутний фланцевий вихідний планетарний редуктор
- Планетарна коробка передач високої точності VRL
- Прямокутний пневматичний редуктор PFR
- PAR Точність Прямокутний Планетарний Коробка передач
- PAD Високоточний фланцевий вихідний планетарний редуктор
- PLF Ecomomy Фланець Вихід Планетарні КПП
- Високоточний планетарний редуктор VRS з високим крутним моментом
- Планетарна коробка передач VRSF Precision
- Планетарна коробка передач PLE Ecomomy