Tổng quan về TẬP GIẤY Hộp giảm tốc hành tinh
Tổng quan về TẬP GIẤY Hộp giảm tốc hành tinh
 Tổng quan về TẬP GIẤY Hộp giảm tốc hành tinh
Tổng quan về TẬP GIẤY Hộp giảm tốc hành tinh● Độ chính xác cao
Định vị chính xác bộ giảm tốc độ PAD nhờ phản ứng ngược nhỏ hơn 3 arcmin
● Độ cứng và mô-men xoắn cao
Việc sử dụng vòng bi tích hợp cải thiện đáng kể độ cứng và mô-men xoắn.
● Khả năng tải cao
Vòng bi lăn hình kim được sử dụng để đạt được khả năng chịu tải tuyệt vời của hộp số.
● Đầu ra mặt bích với phương thức kết nối
Hộp số hành tinh với phương pháp mặt bích và đầu nối có thể được cài đặt trên bất kỳ thương hiệu động cơ nào trên thị trường.
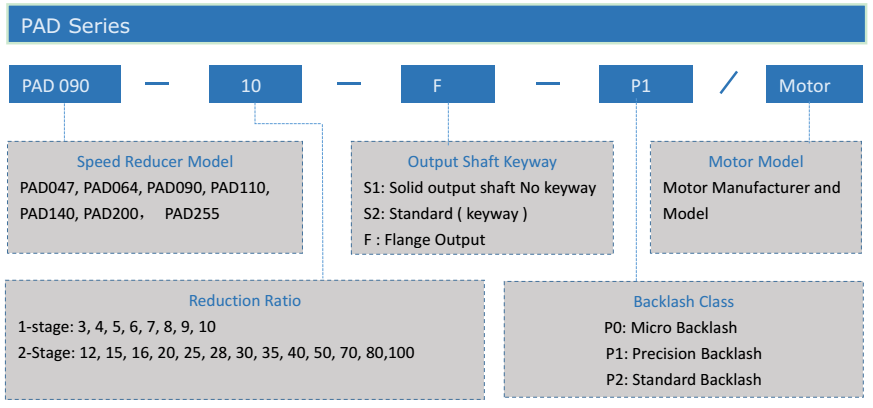
Chỉ định số mô hình của bộ giảm tốc độ PAD
Miêu tả về Độ chính xác cao PAD Ptiền tệ Hộp số
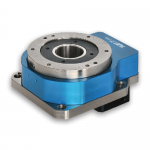
Bộ giảm tốc sê-ri Taiqi PAD là một loại hộp số hành tinh phản ứng ngược có độ chính xác thấp với đầu ra trục rỗng, đảm bảo hiệu suất động trong quá trình chạy và được sử dụng rộng rãi để điều khiển chuyển động cho các ứng dụng khác nhau.
Hộp số hành tinh PAD có tính năng định vị cao hơn, đặc biệt phù hợp với độ chính xác định vị cao, hoạt động theo chu kỳ động và các giải pháp nhỏ gọn để điều khiển chuyển động, tự động hóa và robot.
Độ cứng xoắn cao nhất, thời điểm nghiêng và độ nén là đặc điểm chính của sản phẩm tuyệt vời này.
Hộp số hành tinh PAD có độ chính xác định vị cao hơn với độ cứng xoắn cao hơn, mô-men xoắn cao hơn và nhỏ gọn hơn, mang đến một giải pháp hoàn hảo cho vận hành chu kỳ động, điều khiển chuyển động, tự động hóa và robot.
Kích thước đầu vào hộp số được thay đổi tùy thuộc vào động cơ được cài đặt. Đầu vào sẽ được cấu hình và vận chuyển theo yêu cầu của khách hàng.
1. Khi đường kính của trục động cơ khác với đường kính trục đầu vào, nó có thể được sử dụng với tay áo trục.
2. Hộp số hành tinh PAD có thể được sử dụng với các nhãn hiệu khác nhau của động cơ servo và động cơ bước như Panasonic, Mitsubishi, Yaskawa, Taida, Fuji, v.v.
Áp dụng PAD độ chính xác cao Ptiền tệ Giảm:
Bộ giảm tốc hành tinh PAD này thường được áp dụng trong các lĩnh vực máy công cụ, cánh tay robot công nghiệp, robot máy xúc lật, máy in, thiết bị y tế, thiết bị đo lường, robot giàn, công nghiệp ô tô, máy hàn kín, v.v.
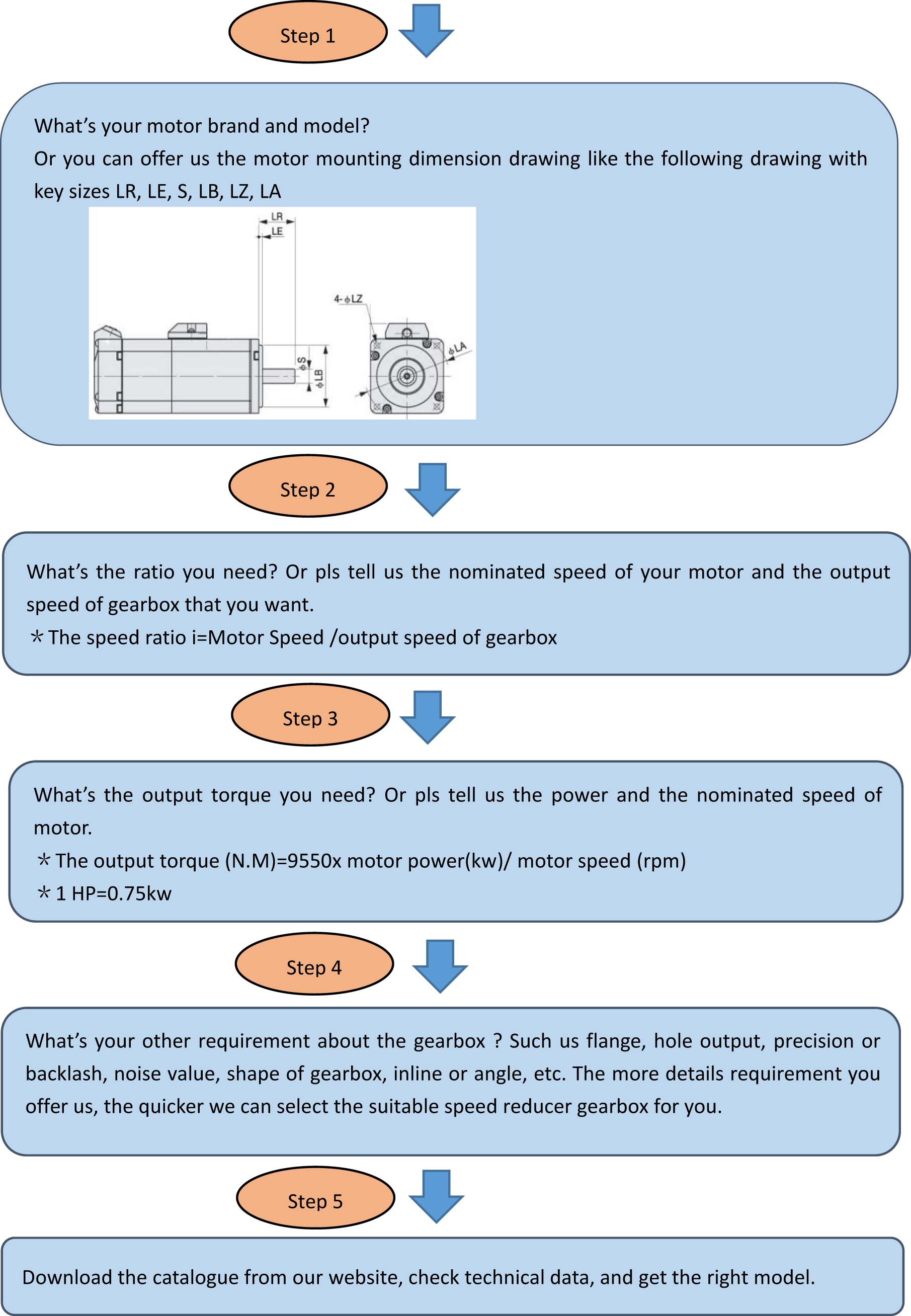
Làm thế nào để chọn đúng tốc độ giảm tốc?
| Số mẫu | Đơn vị | Sân khấu | Tỉ lệ | PAD047 | PAD064 | PAD090 | PAD110 | PAD140 | PAD200 | PAD255 |
| Xếp hạng đầu ra mô-men xoắn | Nm | 1 | 4 | 19 | 50 | 133 | 278 | 555 | 1050 | 1700 |
| 5 | 22 | 60 | 160 | 330 | 650 | 1200 | 2000 | |||
| 7 | 19 | 50 | 140 | 300 | 550 | 1100 | 1800 | |||
| 10 | 14 | 40 | 100 | 230 | 450 | 900 | 1500 | |||
| 2 | 20 | 19 | 50 | 133 | 278 | 555 | 1050 | 1700 | ||
| 25 | 22 | 60 | 160 | 330 | 650 | 1200 | 2000 | |||
| 35 | 19 | 50 | 140 | 300 | 550 | 1100 | 1800 | |||
| 40 | 19 | 45 | 120 | 260 | 500 | 1000 | 1600 | |||
| 50 | 22 | 60 | 160 | 330 | 650 | 1200 | 2000 | |||
| 70 | 19 | 50 | 140 | 300 | 550 | 1100 | 1800 | |||
| 100 | 14 | 40 | 100 | 230 | 450 | 900 | 1500 | |||
| Tối đa Mô-men xoắn đầu ra | Nm | 1,2 | 4-100 | 3 lần mô-men xoắn đầu ra bình thường | ||||||
| Xếp hạng tốc độ đầu vào | Chiều | 1,2 | 4-100 | 5000 | 5000 | 4000 | 4000 | 3000 | 3000 | 2000 |
| Tối đa Tốc độ đầu vào | Chiều | 1,2 | 4-100 | 10000 | 10000 | 8000 | 8000 | 6000 | 6000 | 4000 |
| Micro Backlash P0 | Bắc cực | 1 | 4-10 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 2 | 12-100 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | ||
| Phản ứng ngược chính xác P1 | Bắc cực | 1 | 4-10 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |
| 2 | 20-100 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ||
| Backlash tiêu chuẩn P2 | Bắc cực | 1 | 3-10 | ≤6 | ≤6 | ≤6 | ≤6 | ≤6 | ≤6 | ≤6 |
| 2 | 20-100 | ≤8 | ≤8 | ≤8 | ≤8 | ≤8 | ≤8 | ≤8 | ||
| Độ cứng xoắn | Nm / phút | 1,2 | 3-100 | 8 | 13 | 30 | 80 | 150 | 450 | 1010 |
| Tối đa Lực dọc trục | N | 1,2 | 3-100 | 990 | 1050 | 2850 | 2990 | 10590 | 16660 | 29430 |
| Cuộc sống phục vụ | Hr | 1,2 | 3-100 | 22000 giờ | ||||||
| Hiệu quả | % | 1 | 3-10 | ≥97% | ||||||
| 2 | 20-100 | ≥94% | ||||||||
| Cân nặng | Kilôgam | 1 | 4-10 | 0.7 | 1.3 | 3.2 | 5.8 | 12.3 | 33 | 57.9 |
| 2 | 20-100 | 1 | 1.5 | 4.1 | 7.6 | 16.8 | 38 | 72.6 | ||
| Nhiệt độ hoạt động | ℃ | 1,2 | 3-100 | -15 ℃ ~ + 90 ℃ | ||||||
| Bôi trơn | 1,2 | 3-100 | Mỡ tổng hợp | |||||||
| Lớp bảo vệ | 1,2 | 3-100 | IP65 | |||||||
| Vị trí lắp đặt | 1,2 | 3-100 | Mọi hướng | |||||||
| Mức độ ồn | dB (A) | 1,2 | 3-100 | ≤56 | ≤58 | ≤60 | ≤63 | ≤65 | ≤67 | ≤70 |


những sản phẩm liên quan
 PLF Ecomomy đầu ra mặt bích Hộp số hành tinh
PLF Ecomomy đầu ra mặt bích Hộp số hành tinh- Hộp số hành tinh chính xác góc phải PFR
- Hộp số hành tinh chính xác cao VRL
- PADR Hộp số hành tinh góc phải chính xác cao
- Hộp số hành tinh chính xác VRSF
- Hộp số hành tinh chính xác cao mô-men xoắn cao VRS
- PAR Chính xác Hộp số hành tinh góc phải
- Hộp số hành tinh PLE Ecomomy
- Hộp số hành tinh VRB cho động cơ Servo
- Thiết bị truyền động quay rỗng ZK